Оцените параметры нелинейной модели ARX
sys = nlarx(Data,Orders,Nonlinearity)
sys = nlarx(Data,Orders,Nonlinearity,Name,Value)Name,Value парные аргументы. Эти атрибуты включают нелинейную и пользовательскую структуру регрессора и свойства данных idnlarx модель.
sys = nlarx(Data,LinModel,Nonlinearity)
sys = nlarx(Data,LinModel,Nonlinearity,Name,Value)idnlarx структура модели с помощью одного или нескольких Name,Value парные аргументы.
sys = nlarx(Data,sys0)sys0.
Используйте этот синтаксис для:
Обновите параметры ранее предполагаемой модели, чтобы улучшить подгонку к данным об оценке. В этом случае алгоритм оценки использует параметры sys0 как исходные предположения.
Оцените, что параметры модели ранее создали использование idnlarx конструктор. До оценки можно сконфигурировать свойства модели с помощью записи через точку.
Загрузите данные об оценке.
load twotankdata;Создайте iddata объект из данных об оценке с шагом расчета 0,2 min.
Ts = 0.2; z = iddata(y,u,Ts);
Оцените нелинейную модель ARX.
sys = nlarx(z,[4 4 1]);
Создайте время и массивы данных.
dt = 0.01; t = 0:dt:10; y = 10*sin(2*pi*t)+rand(size(t));
Создайте iddata объект без входного сигнала задан.
z = iddata(y',[],dt);
Оцените нелинейную модель ARX.
sys = nlarx(z,2);
Загрузите данные об оценке.
load twotankdata;Создайте iddata объект из данных об оценке.
z = iddata(y,u,0.2);
Создайте средство оценки нелинейности сети вейвлета с 5 модулями.
NL = wavenet('NumberOfUnits',5);Оцените нелинейную модель ARX.
sys = nlarx(z,[4 4 1],NL);
Генерация пользовательской сетевой нелинейности требует определения пользовательской модульной функции.
Задайте модуль, функционируют и сохраняют его как gaussunit.m.
% Copyright 2015 The MathWorks, Inc. function [f, g, a] = gaussunit(x) f = exp(-x.*x); if nargout>1 g = -2*x.*f; a = 0.2; end
Создайте пользовательскую сетевую нелинейность с помощью gaussunit функция.
H = @gaussunit; CNet = customnet(H);
Загрузите данные об оценке.
load iddata1;
Оцените нелинейную модель ARX с помощью пользовательской сети.
sys = nlarx(z1,[1 2 1],CNet);
Загрузите данные об оценке.
load motorizedcamera;Создайте iddata объект.
z = iddata(y,u,0.02,'Name','Motorized Camera','TimeUnit','s');
z iddata объект с 6 входными параметрами и 2 выходными параметрами.
Задайте порядки модели.
Orders = [ones(2,2),2*ones(2,6),ones(2,6)];
Задайте различные средства оценки нелинейности для каждого выходного канала.
NL = [wavenet('NumberOfUnits',2),linear];Оцените нелинейную модель ARX.
sys = nlarx(z,Orders,NL);
Загрузите данные об оценке и создайте iddata объект.
load motorizedcamera;
z = iddata(y,u,0.02);Задайте порядки модели.
Orders = [ones(2,2),2*ones(2,6),ones(2,6)];
Оцените нелинейную модель ARX с помощью sigmoidnet нелинейности с 4 модулями для всех выходных каналов.
m = nlarx(z,Orders,sigmoidnet('numberOfUnits',4));Загрузите данные об оценке.
load iddata1;Создайте массив ячеек с двумя пользовательскими регрессорами.
C = {'y1(t-1)^2','y1(t-2)*u1(t-3)'};Оцените нелинейную модель ARX с пользовательскими регрессорами и никакими стандартными регрессорами.
sys = nlarx(z1,[0 0 0],'linear','CustomRegressors',C);
Загрузите данные об оценке.
load iddata1;Задайте пользовательский объект регрессора для y1(t-1)^2.
C1 = customreg(@(x)x^2,{'y1'},[1]);Задайте пользовательский объект регрессора для y1(t-2)*u1(t-3).
C2 = customreg(@(x,y)x*y,{'y1','u1'},[2 3]);Создайте пользовательский объектный массив регрессора.
C = [C1,C2];
Оцените нелинейную модель ARX с пользовательскими регрессорами.
sys = nlarx(z1,[0 0 0],'linear','CustomRegressors',C);
Перечислите регрессоры модели.
getreg(sys);
Regressors:
y1(t-1)^2
y1(t-2)*u1(t-3)
Загрузите данные об оценке.
load iddata1;Оцените модель Nonlinear ARX с помощью 'search' опция.
sys = nlarx(z1,[4 4 1],'sigmoidnet','NonlinearRegressors','search');
Перечислите нелинейные индексы регрессора модели.
sys.NonlinearRegressors
ans = 1×4
3 5 6 7
Перечислите все регрессоры модели.
getreg(sys)
Regressors:
y1(t-1)
y1(t-2)
y1(t-3)
y1(t-4)
u1(t-1)
u1(t-2)
u1(t-3)
u1(t-4)
Оптимальный набор нелинейных регрессоров для этой модели включает y1(t-3), u1(t-1), u1(t-2), и u1(t-3).
Загрузите данные об оценке.
load iddata1;Создайте сигмоидальное сетевое средство оценки нелинейности без линейного члена.
SNL = sigmoidnet('LinearTerm','off');
Оцените нелинейную модель ARX.
sys = nlarx(z1,[2 2 1],SNL);
Загрузите данные об оценке.
load throttledata;Детрендируйте данные.
Tr = getTrend(ThrottleData); Tr.OutputOffset = 15; DetrendedData = detrend(ThrottleData,Tr);
Оцените линейную модель ARX.
LinearModel = arx(DetrendedData,[2 1 1]);
Оцените нелинейную модель ARX с помощью линейной модели. Порядки модели, задержки и линейные параметры NonlinearModel выведены из LinearModel.
NonlinearModel = nlarx(ThrottleData,LinearModel);
Загрузите данные об оценке.
load iddata1;Создайте idnlarx модель.
sys = idnlarx([2 2 1]);
Сконфигурируйте модель с помощью записи через точку, чтобы установить следующие параметры:
Используйте сигмоидальную сетевую нелинейность
Ищите оптимальное нелинейное подмножество регрессора
sys.Nonlinearity = 'sigmoidnet'; sys.NonlinearRegressors = 'search';
Оцените нелинейную модель ARX со структурой и свойствами, заданными в idnlarx объект.
sys = nlarx(z1,sys);
Если оценка останавливается в локальном минимуме, можно встревожить модель с помощью init и повторно оцените модель.
Загрузите данные об оценке.
load iddata1;Оцените первоначальную нелинейную модель с помощью определенных нелинейных регрессоров.
sys1 = nlarx(z1,[4 2 1],'sigmoidnet','NonlinearRegressors',[1:3]);
Случайным образом встревожьте параметры модели, чтобы избежать локальных минимумов.
sys2 = init(sys1);
Оцените новую нелинейную модель со встревоженными значениями.
sys2 = nlarx(z1,sys2);
Загрузите данные об оценке.
load twotankdata;Создайте iddata объект из данных об оценке.
z = iddata(y,u,0.2);
Создайте nlarxOptions набор опции, задающий ошибочную цель минимизации симуляции и максимум 50 итераций оценки.
opt = nlarxOptions;
opt.Focus = 'simulation';
opt.SearchOptions.MaxIterations = 50;Оцените нелинейную модель ARX.
sys = nlarx(z,[4 4 1],'sigmoidnet',opt);Загрузите данные о регуляризации в качестве примера.
load regularizationExampleData.mat nldata;
Создайте sigmoidnet нелинейность с 30 модулями, и задает порядки модели.
NL = sigmoidnet('NumberOfUnits',30);
Orders = [1 2 1];Создайте набор опции оценки и установите метод поиска оценки для lm.
opt = nlarxOptions('SearchMethod','lm');
Оцените неупорядоченную модель.
sys = nlarx(nldata,Orders,NL,opt);
Сконфигурируйте регуляризацию Lambda параметр.
opt.Regularization.Lambda = 1e-8;
Оцените упорядоченную модель.
sysR = nlarx(nldata,Orders,NL,opt);
Сравните эти две модели.
compare(nldata,sys,sysR)

Большой отрицательный результат подгонки для неупорядоченной модели указывает на плохую подгонку к данным. Оценка упорядоченной модели приводит к значительно лучшему результату.
Нелинейная модель ARX состоит из регрессоров модели и средства оценки нелинейности. Средство оценки нелинейности включает и линейные и нелинейные функции, которые действуют на регрессоры модели, чтобы дать выход модели. Эта блок-схема представляет структуру нелинейной модели ARX в сценарии симуляции.
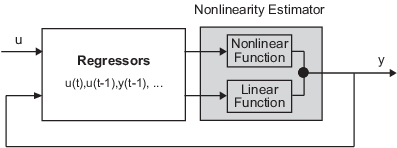
Программное обеспечение вычисляет нелинейную модель ARX выход y на двух этапах:
Это вычисляет значения регрессора из текущих и прошлых входных значений и прошлых выходных данных.
В самом простом случае регрессоры являются задержанными вводами и выводами, такими как u (t-1) и y (t-3). Подобные регрессоры называются стандартными регрессорами. Вы задаете стандартные регрессоры с помощью порядков модели и задержки. Для получения дополнительной информации смотрите Нелинейные Порядки Модели ARX и Задержку. Можно также задать пользовательские регрессоры, которые являются нелинейными функциями задержанных вводов и выводов. Например, u (t-1) *y (t-3). Чтобы создать набор полиномиальных регрессоров типа, использовать polyreg.
По умолчанию все регрессоры являются входными параметрами и к линейному и к нелинейным функциональным блокам средства оценки нелинейности. Можно выбрать подмножество регрессоров как входные параметры к нелинейному функциональному блоку.
Это сопоставляет регрессоры с выходом модели с помощью блока средства оценки нелинейности. Блок средства оценки нелинейности может включать линейные и нелинейные блоки параллельно. Например:
Здесь, x является вектором из регрессоров, и r является средним значением регрессоров x. выход блока линейной функции и является аффинным когда d ≠ 0. d является скалярным смещением. представляет выход нелинейного функционального блока. Q является матрицей проекции, которая делает вычисления хорошо подготовленными. Точная форма F (x) зависит от вашего выбора средства оценки нелинейности. Можно выбрать из доступных средств оценки нелинейности, таких как сети древовидного раздела, сети вейвлета и многоуровневые нейронные сети. Можно также исключить или линейное или нелинейный функциональный блок от средства оценки нелинейности.
При оценке нелинейной модели ARX программное обеспечение вычисляет значения параметра модели, такие как L, r, d, Q и другие параметры, задающие g.
Получившиеся нелинейные модели ARX idnlarx объекты, которые хранят все данные модели, включая регрессоры модели и параметры средства оценки нелинейности. Для получения дополнительной информации об этих объектах, смотрите Нелинейные Структуры модели.
aic | fpe | goodnessOfFit | idnlarx | isnlarx | nlarxOptions
