

Нелинейная модель ARX
sys = idnlarx(Orders)
sys = idnlarx(Orders,Nonlinearity)
sys = idnlarx(Orders,Nonlinearity,Name,Value)
sys = idnlarx(LinModel)
sys = idnlarx(LinModel,Nonlinearity)
sys = idnlarx(LinModel,Nonlinearity,Name,Value)
sys = idnlarx(Orders)
sys = idnlarx(Orders,Nonlinearity)
sys = idnlarx(Orders,Nonlinearity,Name,Value)idnlarx структура модели с помощью одного или нескольких Name,Value парные аргументы.
sys = idnlarx(LinModel)LinModel задавать порядки модели и начальные значения линейных коэффициентов модели.
sys = idnlarx(LinModel,Nonlinearity)
sys = idnlarx(LinModel,Nonlinearity,Name,Value)idnlarx структура модели с помощью одного или нескольких Name,Value парные аргументы.
idnlarx представляет нелинейную модель ARX, которая является расширением линейной структуры ARX и содержит линейные и нелинейные функции. Для получения дополнительной информации смотрите, что Нелинейная Модель ARX Расширяет Линейную Структуру ARX.
Используйте nlarx команда к оба создает idnlarx возразите и оцените параметры модели.
Можно также использовать idnlarx конструктор, чтобы создать нелинейную модель ARX и затем оценить использование параметров модели nlarx или pem.
Для idnlarx свойства объектов, смотрите Свойства.
|
Порядки модели и задержки определения настройки регрессора в виде неотрицательных целых чисел. Для модели с ny каналы выхода и каналы входа nu:
na = [1 2; 2 3] nb = [1 2 3; 2 3 1]; nk = [2 0 3; 1 0 5]; Данные об оценке для этой системы имеют три входных параметров (
Примечание Минимальной задержкой для регрессоров на основе выходных переменных всегда является | ||||||||||||
|
Регрессоры создали из комбинаций вводов и выводов в виде одного из следующего:
Для модели с ny выходные параметры задайте ny-by-1 массив ячеек Эти регрессоры в дополнение к стандартным регрессорам на основе Значение по умолчанию: | ||||||||||||
|
Подмножество регрессоров, которые входят как входные параметры в нелинейный блок модели в виде одного из следующего:
Для модели с несколькими выходными параметрами задайте массив ячеек элементов ny, где ny является количеством выходных каналов. Для каждого выхода задайте одну из предыдущих опций. В качестве альтернативы, чтобы применить то же подмножество регрессора ко всем выходным параметрам модели, задайте Значение по умолчанию: | ||||||||||||
|
Средство оценки нелинейности в виде одного из следующего:
Для получения дополнительной информации смотрите Доступные Средства оценки Нелинейности для Нелинейных Моделей ARX. Определение вектора символов, например
Для Значение по умолчанию: | ||||||||||||
|
Сводный отчет, который содержит информацию об опциях оценки и результатах, когда модель оценивается с помощью
Содержимое m = idnlarx([2 2 1]); m.Report.OptionsUsed ans =
[]Если вы используете load iddata1;
m = nlarx(z1, [2 2 1]);
m.Report.OptionsUsedOption set for the nlarx command:
IterativeWavenet: 'auto'
Focus: 'prediction'
Display: 'off'
Regularization: [1x1 struct]
SearchMethod: 'auto'
SearchOptions: [1x1 idoptions.search.identsolver]
OutputWeight: 'noise'
Advanced: [1x1 struct]
Для получения дополнительной информации об этом свойстве и как использовать его, см. Выходные аргументы в | ||||||||||||
|
Независимая переменная для входных параметров, выходных параметров, и — когда доступный — внутренние состояния в виде вектора символов. Значение по умолчанию: | ||||||||||||
|
Шумовое отклонение (ковариационная матрица) инноваций модели e. | ||||||||||||
|
Размер шага. Значение по умолчанию: | ||||||||||||
|
Модули для переменной времени, шаг расчета
Изменение этого свойства не оказывает влияния на другие свойства, и поэтому изменяет полное поведение системы. Использование Значение по умолчанию: | ||||||||||||
|
Введите названия канала в виде одного из следующего:
В качестве альтернативы используйте автоматическое векторное расширение, чтобы присвоить входные имена для мультивходных моделей. Например, если sys.InputName = 'controls'; Входные имена автоматически расширяются до Когда вы оцениваете модель с помощью Можно использовать краткое обозначение Входные названия канала имеют несколько использования, включая:
Значение по умолчанию: | ||||||||||||
|
Введите модули канала в виде одного из следующего:
Используйте Значение по умолчанию: | ||||||||||||
|
Введите группы канала. sys.InputGroup.controls = [1 2]; sys.InputGroup.noise = [3 5]; создает входные группы под названием sys(:,'controls') Значение по умолчанию: Struct без полей | ||||||||||||
|
Выведите названия канала в виде одного из следующего:
В качестве альтернативы используйте автоматическое векторное расширение, чтобы присвоить выходные имена для мультивыходных моделей. Например, если sys.OutputName = 'measurements'; Выходные имена автоматически расширяются до Когда вы оцениваете модель с помощью Можно использовать краткое обозначение Выходные названия канала имеют несколько использования, включая:
Значение по умолчанию: | ||||||||||||
|
Выведите модули канала в виде одного из следующего:
Используйте Значение по умолчанию: | ||||||||||||
|
Выведите группы канала. sys.OutputGroup.temperature = [1]; sys.InputGroup.measurement = [3 5]; создает выходные группы под названием sys('measurement',:)Значение по умолчанию: Struct без полей | ||||||||||||
|
Имя системы в виде вектора символов. Например, Значение по умолчанию: | ||||||||||||
|
Любой текст, который вы хотите сопоставить с системой, сохраненной как строка или массив ячеек из символьных векторов. Свойство хранит, какой бы ни тип данных вы обеспечиваете. Например, если sys1.Notes = "sys1 has a string."; sys2.Notes = 'sys2 has a character vector.'; sys1.Notes sys2.Notes
ans =
"sys1 has a string."
ans =
'sys2 has a character vector.'
Значение по умолчанию: | ||||||||||||
|
Любой тип данных вы хотите сопоставить с системой в виде любого типа данных MATLAB®. Значение по умолчанию: |
Нелинейная модель ARX состоит из регрессоров модели и средства оценки нелинейности. Средство оценки нелинейности включает и линейные и нелинейные функции, которые действуют на регрессоры модели, чтобы дать выход модели. Эта блок-схема представляет структуру нелинейной модели ARX в сценарии симуляции.
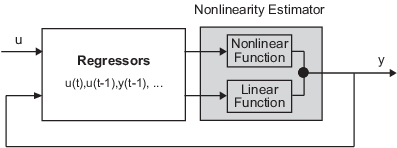
Программное обеспечение вычисляет нелинейную модель ARX выход y на двух этапах:
Это вычисляет значения регрессора из текущих и прошлых входных значений и прошлых выходных данных.
В самом простом случае регрессоры являются задержанными вводами и выводами, такими как u (t-1) и y (t-3). Подобные регрессоры называются стандартными регрессорами. Вы задаете стандартные регрессоры с помощью порядков модели и задержки. Для получения дополнительной информации смотрите Нелинейные Порядки Модели ARX и Задержку. Можно также задать пользовательские регрессоры, которые являются нелинейными функциями задержанных вводов и выводов. Например, u (t-1) *y (t-3). Чтобы создать набор полиномиальных регрессоров типа, использовать polyreg.
По умолчанию все регрессоры являются входными параметрами и к линейному и к нелинейным функциональным блокам средства оценки нелинейности. Можно выбрать подмножество регрессоров как входные параметры к нелинейному функциональному блоку.
Это сопоставляет регрессоры с выходом модели с помощью блока средства оценки нелинейности. Блок средства оценки нелинейности может включать линейные и нелинейные блоки параллельно. Например:
Здесь, x является вектором из регрессоров, и r является средним значением регрессоров x. выход блока линейной функции и является аффинным когда d ≠ 0. d является скалярным смещением. представляет выход нелинейного функционального блока. Q является матрицей проекции, которая делает вычисления хорошо подготовленными. Точная форма F (x) зависит от вашего выбора средства оценки нелинейности. Можно выбрать из доступных средств оценки нелинейности, таких как сети древовидного раздела, сети вейвлета и многоуровневые нейронные сети. Можно также исключить или линейное или нелинейный функциональный блок от средства оценки нелинейности.
При оценке нелинейной модели ARX программное обеспечение вычисляет значения параметра модели, такие как L, r, d, Q и другие параметры, задающие g.
Получившиеся нелинейные модели ARX idnlarx объекты, которые хранят все данные модели, включая регрессоры модели и параметры средства оценки нелинейности. Для получения дополнительной информации об этих объектах, смотрите Нелинейные Структуры модели.
addreg | customnet | customreg | getreg | idnlarx/findop | linear | linearize | nlarx | pem | polyreg | sigmoidnet | wavenet