BLDC
Бесщеточный двигатель постоянного тока с тремя обмотками с трапециевидным распределением потока
Описание
Блок BLDC моделирует постоянный магнит синхронная машина с трехфазным статором раны Уая. Блок имеет четыре опции для определения распределения потока постоянного магнита как функция угла ротора. Две опции допускают простую параметризацию путем принятия совершенного трапецоида для коэффициента противо-ЭДС. Для простой параметризации вы задаете или потокосцепление или вызванный ротором коэффициент противо-ЭДС. Другие две опции дают более точные результаты с помощью табличных данных, которые вы задаете. Для более точных результатов вы задаете или частную производную потокосцепления или измеренный коэффициент противо-ЭДС, постоянную для данной скорости ротора.
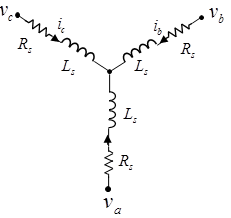
Рисунок показывает эквивалентную электрическую схему для обмоток статора.
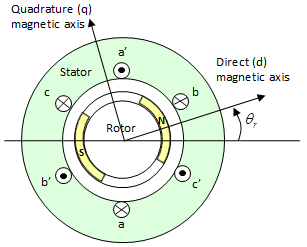
Моторная конструкция
Этот рисунок показывает моторную конструкцию с однополюсно-парным на роторе.
Для соглашения осей на предыдущем рисунке a - выравниваются фаза и потоки постоянного магнита, когда угол ротора θr является нулем. Блок поддерживает второе определение оси ротора. Для второго определения угол ротора является углом между a - фазой магнитная ось и ротором q - ось.
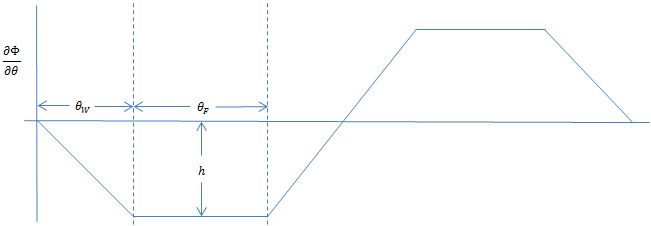
Трапециевидная скорость изменения потока
Магнитное поле ротора из-за постоянных магнитов создает трапециевидную скорость изменения потока с углом ротора. Рисунок показывает эту скорость изменения потока.
Коэффициент противо-ЭДС является скоростью изменения потока, заданного
где:
Высота h из трапециевидной скорости изменения потока профиль выведен из потока пика постоянного магнита.
Интеграция в области значений 0 к π/2,
где:
Φmax является потокосцеплением постоянного магнита.
h является скоростью изменения высоты профиля потока.
θF является углом ротора, передвигаются, по которому, коэффициент противо-ЭДС что поток постоянного магнита вызывает в статоре, является постоянным.
θW является углом ротора, передвигаются, по которым увеличениям коэффициента противо-ЭДС или уменьшается линейно, когда ротор перемещается в постоянную скорость.
Реорганизация предыдущего уравнения,
Электрические уравнения определения
Напряжения через обмотки статора заданы
где:
va, vb и vc являются внешними напряжениями, применился к трем моторным электрическим соединениям.
Rs является эквивалентным сопротивлением каждой обмотки статора.
ia, ib и ic являются токами, текущими в обмотках статора.
и
скорости изменения магнитного потока в каждой обмотке статора.
Постоянный магнит и эти три обмотки способствуют общему потоку, соединяющему каждую обмотку. Общий поток задан
где:
ψa, ψb и ψc являются общими потоками, соединяющими каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндукциями обмоток статора.
Lab, Lac, Lba, и т.д. является взаимной индуктивностью обмоток статора.
ψam, ψbm и ψcm являются потоками постоянного магнита, соединяющими обмотки статора.
Индуктивность в обмотках статора является функциями угла ротора, заданного
и
где:
Ls является самоиндукцией статора на фазу — средняя самоиндукция каждой из обмоток статора.
Lm является колебанием индуктивности статора — колебание самоиндукции и взаимной индуктивности с изменяющимся углом ротора.
Ms является статором взаимная индуктивность — средняя взаимная индуктивность между обмотками статора.
Поток постоянного магнита, соединяющий каждую обмотку статора, следует за трапециевидным показанным на рисунке профилем. Блок реализует трапециевидный профиль с помощью интерполяционных таблиц, чтобы вычислить значения потока постоянного магнита.
Упрощенные уравнения
Напряжение определения и уравнения крутящего момента для блока
и
где:
vd, vq и v0 является d - ось, q - ось и напряжения нулевой последовательности.
P является Преобразованием Парка, заданным
N является количеством пар полюса постоянного магнита ротора.
ω является скоростью вращательного механического устройства ротора.
и
частные производные мгновенного потока постоянного магнита, соединяющего каждую обмотку фазы.
id, iq и i0 является d - ось, q - ось и токи нулевой последовательности, заданные
Ld = Ls + Ms + 3/2 Lm. Ld является статором d - составляющая индукции.
Lq = Ls + Ms − 3/2 Lm. Lq является статором q - составляющая индукции.
L0 = Ls – 2Ms. L0 является индуктивностью нулевой последовательности статора.
T является крутящим моментом ротора. Крутящий момент течет из моторного случая (блокируйте физический порт C) к моторному ротору (блокируют физический порт R).
Вычисление потерь в железе
Потери в железе разделены на два условия, одно представление основного пути к намагничиванию и другое представление перекрестного зубного пути к совету, который становится активным во время ослабленной операции поля. Модель потерь в железе, которая основана на работе Меллора [3].
Термин, представляющий основной путь к намагничиванию, зависит от вызванного напряжения статора RMS, :
Это - доминирующий термин в течение операции без загрузок. k является коэффициентом противо-ЭДС, постоянной, связывающим вольты RMS на Гц. Это задано как , где f является электрической частотой. Первый срок на правой стороне является магнитной гистерезисной потерей, второй является потеря токов Фуко, и третьей является избыточная потеря. Эти три коэффициента, появляющиеся на числителях, выведены из значений, что вы предусматриваете гистерезис разомкнутой цепи, вихрь и избыточные потери.
Термин, представляющий перекрестный зубной путь к совету, становится важным, когда поле размагничивания создано и может быть определено из теста короткой схемы анализа конечных элементов. Это зависит от эдс RMS, сопоставленной с перекрестным зубным потоком совета, :
Три условия числителя выведены из значений, вы предусматриваете гистерезис короткой схемы, вихрь и избыточные потери.
Тепловые порты
Блок имеет четыре дополнительных тепловых порта, один для каждой из этих трех обмоток и один для ротора. Эти порты скрыты по умолчанию. Чтобы осушить тепловые порты, щелкните правой кнопкой по блоку по своей модели, выберите > , и затем выберите желаемый вариант блока с тепловыми портами: или . Это действие отображает тепловые порты на значке блока и отсоединяет параметры Thermal Port и Temperature Dependence. Эти параметры описаны далее на этой странице с описанием.
Используйте тепловые порты, чтобы симулировать эффекты медного сопротивления и потерь в железе, которые преобразовывают электроэнергию в теплоту. Для получения дополнительной информации об использовании тепловых портов в блоках привода смотрите Термальные эффекты Симуляции во Вращательных и Поступательных Приводах.
Порты
Сохранение
развернуть все
~ — Трехфазный порт
электрический
n — Нейтральная фаза
электрический
Электрический порт сохранения сопоставлен с нейтральной фазой
R — Моторный ротор
механическое устройство
Порт сохранения вращательного механического устройства сопоставлен с моторным ротором
C — Моторный случай
механическое устройство
Порт сохранения вращательного механического устройства сопоставлен с моторным случаем
HA — Обмотка теплового порта
тепловой
Тепловой порт сохранения, сопоставленный с обмоткой A. Для получения дополнительной информации смотрите Тепловые Порты.
HB — Обмотка B тепловой порт
тепловой
Тепловой порт сохранения, сопоставленный с обмоткой B. Для получения дополнительной информации смотрите Тепловые Порты.
HC — Обмотка C тепловой порт
тепловой
Тепловой порт сохранения, сопоставленный с обмоткой C. Для получения дополнительной информации смотрите Тепловые Порты.
HR — Ротор тепловой порт
тепловой
Тепловой порт сохранения сопоставлен с ротором. Для получения дополнительной информации смотрите Тепловые Порты.
Параметры
развернуть все
Ротор
Winding type — Настройка обмоток
Wye-wound (значение по умолчанию) | Delta-wound
Выберите настройку для обмоток:
Wye-wound — Обмотки являются раной Уая.
Delta-wound — Обмотки являются раной дельты. a - фаза соединяется между портами a и b, b - фазой между портами b и c и c - фаза между портами c и a.
Back EMF profile — Профиль Коэффициента противо-ЭДС
Perfect trapezoid - specify maximum flux linkage (значение по умолчанию) | Perfect trapezoid - specify maximum rotor-induced back emf | Tabulated - specify flux partial derivative with respect to rotor angle | Tabulated - specify rotor-induced back emf as a function of rotor angle
Параметризация для определения распределения потока постоянного магнита как функция угла ротора. Выберите:
Perfect trapezoid - specify maximum flux linkage задавать максимальное потокосцепление для постоянного магнита и угла ротора, где коэффициент противо-ЭДС является постоянным. Блок принимает совершенный трапецоид для коэффициента противо-ЭДС. Это - значение по умолчанию.
Perfect trapezoid - specify maximum rotor-induced back emf задавать максимум вызванный ротором коэффициент противо-ЭДС и соответствующая скорость ротора. Блок принимает совершенный трапецоид для коэффициента противо-ЭДС.
Tabulated - specify flux partial derivative with respect to rotor angle задавать значения для частной производной потокосцепления и соответствующих углов ротора.
Tabulated - specify rotor-induced back emf as a function of rotor angle задавать измеренный коэффициент противо-ЭДС, постоянную и соответствующую скорость ротора и углы.
Maximum permanent magnet flux linkage — Максимальное потокосцепление постоянного магнита
0.03 Wb (значение по умолчанию)
Пиковое потокосцепление постоянного магнита с любой из обмоток статора.
Зависимости
Чтобы включить этот параметр, установите Back EMF profile на Perfect trapezoid - specify maximum flux linkage.
Rotor angle over which back emf is constant — Угол ротора, по которому коэффициент противо-ЭДС является постоянным
pi / 12
rad (значение по умолчанию)
Угол ротора передвигается, по которому поток постоянного магнита, соединяющий обмотку статора, является постоянным. Этот угол является θF на рисунке, который показывает Трапециевидную Скорость изменения Потока.
Зависимости
Чтобы включить этот параметр, установите Back EMF profile на Perfect trapezoid - specify maximum flux linkage или Perfect trapezoid - specify maximum rotor-induced back emf.
Maximum rotor-induced back emf — Максимум вызванный ротором коэффициент противо-ЭДС
9.6 V (значение по умолчанию)
Пик вызванный ротором коэффициент противо-ЭДС в обмотки статора.
Зависимости
Чтобы включить этот параметр, установите Back EMF profile на Perfect trapezoid - specify maximum rotor-induced back emf.
Rotor-induced back emf — Вызванный ротором коэффициент противо-ЭДС
[0, -9.6, -9.6, 9.6, 9.6, 0] V (значение по умолчанию)
Вектор из значений для вызванного ротором коэффициента противо-ЭДС как функция угла ротора. Первые и последние значения должны быть тем же самым и обычно равны нулю. Для получения дополнительной информации смотрите параметр Corresponding rotor angles. Первые и последние значения являются тем же самым, потому что поток является циклическим с периодом , где N является количеством пар полюса постоянного магнита.
Зависимости
Чтобы включить этот параметр, установите Back EMF profile на Tabulated - specify rotor-induced back emf as a function of rotor angle.
Flux linkage partial derivative with respect to rotor angle — Частная производная потокосцепления относительно угла ротора
[0, -.1528, -.1528, .1528, .1528, 0] Wb/rad (значение по умолчанию)
Вектор из значений для частной производной потокосцепления (где потокосцепление является количеством времен потока обмотки поворотов) относительно угла ротора. Первые и последние значения должны быть тем же самым и обычно равны нулю. Для получения дополнительной информации смотрите параметр Corresponding rotor angles. Первые и последние значения являются тем же самым, потому что поток является циклическим с периодом , где N является количеством пар полюса постоянного магнита.
Corresponding rotor angles — Соответствующие углы ротора
[0, 7.5, 22.5, 37.5, 52.5, 60] deg (значение по умолчанию)
Вектор из углов ротора, где частная производная потокосцепления или вызванный ротором коэффициент противо-ЭДС заданы. Угол ротора задан как угол между a - фазой магнитная ось и d - ось. Таким образом, когда угол является нулем, магнитные поля из-за ротора и a - обмотка фазы выравнивается. Это определение используется независимо от вашей установки блока для углового определения ротора. Первое значение является нулем, и последнее значение , где N является количеством пар полюса постоянного магнита.
Зависимости
Чтобы включить этот параметр, установите Back EMF profile на Tabulated - specify flux partial derivative with respect to rotor angle или Tabulated - specify rotor-induced back emf as a function of rotor angle.
Rotor speed used for back emf measurement — Скорость ротора используется для измерения коэффициента противо-ЭДС
600 rpm (значение по умолчанию)
Задайте скорость ротора, соответствующую максимуму вызванный ротором коэффициент противо-ЭДС.
Зависимости
Чтобы включить этот параметр, установите Back EMF profile на Perfect trapezoid - specify maximum rotor-induced back emf или Tabulated - specify rotor-induced back emf as a function of rotor angle.
Number of pole pairs Количество пар полюсов
6
Количество постоянного магнита подпирает пары шестами на роторе.
Rotor angle definition — Контрольная точка для углового измерения ротора
Angle between the a-phase magnetic axis and the d-axis (значение по умолчанию) | Angle between the a-phase magnetic axis and the q-axis
Контрольная точка для углового измерения ротора. Значением по умолчанию является Angle between the a-phase magnetic axis and the d-axis. Это определение показывают на Моторном рисунке Конструкции. Когда вы выбираете это значение, ротор и a - потоки фазы выравниваются, когда угол ротора является нулем.
Другим значением, которое можно выбрать для этого параметра, является Angle between the a-phase magnetic axis and the q-axis. Когда вы выбираете это значение, a - текущая фаза генерирует максимальный крутящий момент, когда угол ротора является нулем.
Статор
Modeling fidelity — Моделирование точности
Constant Ld and Lq (значение по умолчанию) | Tabulated Ld and Lq
Выберите точность моделирования:
Constant Ld and Lq — Ld и значения Lq являются постоянными и заданы их соответствующими параметрами.
Tabulated Ld and Lq — Ld и значения Lq вычисляются онлайн из текущих интерполяционных таблиц DQ можно следующим образом:
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ld, Lq, and L0.
Stator parameterization — Параметризация статора
Specify Ld, Lq, and L0 (значение по умолчанию) | Specify Ls, Lm, and Ms
Выберите Specify Ld, Lq, and L0 или Specify Ls, Lm, and Ms.
Stator d-axis inductance, Ld — D-составляющая-индукции статора
0.00022 H (значение по умолчанию)
D-составляющая-индукции.
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ld, Lq, and L0 и Modeling fidelity к Constant Ld and Lq.
Stator q-axis inductance, Lq — Q-составляющая-индукции статора
0.00022 H (значение по умолчанию)
Q-составляющая-индукции.
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ld, Lq, and L0 и Modeling fidelity к Constant Ld and Lq.
Direct-axis current vector, iD — Прямая ось текущий вектор
[-200, 0, 200] A (значение по умолчанию)
Прямая ось текущий вектор, ID.
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ld, Lq, and L0 и Modeling fidelity к Tabulated Ld and Lq.
Quadrature-axis current vector, iQ — Квадратурная ось текущий вектор
[-200, 0, 200] A (значение по умолчанию)
Квадратурная ось текущий вектор, IQ.
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ld, Lq, and L0 и Modeling fidelity к Tabulated Ld and Lq.
Ld matrix, Ld(id,iq) — Матрица Ld
0.00022 * ones(3, 3)
H (значение по умолчанию)
Матрица Ld.
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ld, Lq, and L0 и Modeling fidelity к Tabulated Ld and Lq.
Lq matrix, Lq(id,iq) — Матрица Lq
0.00022 * ones(3, 3)
H (значение по умолчанию)
Матрица Lq.
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ld, Lq, and L0 и Modeling fidelity к Tabulated Ld and Lq.
Stator zero-sequence inductance, L0 — Индуктивность нулевой последовательности статора
0.00016 H (значение по умолчанию)
Индуктивность нулевой последовательности.
Зависимости
Включить этот параметр также:
Установите Winding Type на Wye-wound, Zero sequence к Include, и Stator parameterization к Specify Ld, Lq, and L0.
Установите Winding Type на Delta-wound и Stator parameterization к Specify Ld, Lq, and L0.
Stator self-inductance per phase, Ls — Самоиндукция статора на фазу
0.0002 H (значение по умолчанию)
Средняя самоиндукция каждой из трех обмоток статора.
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ls, Lm, and Ms.
Stator inductance fluctuation, Lm — Колебание индуктивности статора
0 H (значение по умолчанию)
Колебание самоиндукции и взаимной индуктивности обмоток статора с углом ротора.
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ls, Lm, and Ms.
Stator mutual inductance, Ms — Статор взаимная индуктивность
0.00002 H (значение по умолчанию)
Средняя взаимная индуктивность между обмотками статора.
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ls, Lm, and Ms.
Stator resistance per phase, Rs — Сопротивление статора на фазу
0.013 Ohm (значение по умолчанию)
Сопротивление каждой из обмоток статора.
Zero sequence — Нулевая опция последовательности
Include (значение по умолчанию) | Exclude
Опция, чтобы включать или исключить условия нулевой последовательности.
Include — Включайте условия нулевой последовательности. Чтобы приоритизировать точность модели, используйте эту настройку по умолчанию. Используя эту опцию:
Exclude — Исключите условия нулевой последовательности. Чтобы приоритизировать скорость симуляции для настольной симуляции или развертывания приложений, выберите эту опцию.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Winding Type на Wye-wound.
Потери в железе
Iron-loss — Включите расчет Потерь в железе
None (значение по умолчанию) | Empirical
Задайте вычислительную модель потерь в железе.
Open-circuit iron losses, [P_hysteresis P_eddy P_excess] — Потери в железе разомкнутой цепи
[0, 0, 0] W (значение по умолчанию)
Вектор-строка, длины 3, потерь в железе разомкнутой цепи из-за гистерезиса, Эдди и избыточных потерь, соответственно, на частоте задан Electrical frequency at which losses determined.
Зависимости
Чтобы включить этот параметр, установите Iron-loss на Empirical.
Short-circuit iron losses, [P_hysteresis P_eddy P_excess] — Потери в железе короткой схемы
[0, 0, 0] W (значение по умолчанию)
Вектор-строка, длины 3, потерь в железе короткой схемы из-за гистерезиса, Эдди и избыточных потерь, соответственно, на частоте задан Electrical frequency at which losses determined.
Зависимости
Чтобы включить этот параметр, установите Iron-loss на Empirical.
Electrical frequency at which losses determined — Электрическая частота, на которой определяются потери
60 Hz (значение по умолчанию)
Электрическая частота, на которой были измерены разомкнутая цепь и потери в железе короткой схемы.
Зависимости
Чтобы включить этот параметр, установите Iron-loss на Empirical.
Short-circuit RMS current for short-circuit iron losses — RMS короткой схемы, текущая для потерь в железе короткой схемы
95 A (значение по умолчанию)
Получившаяся фаза RMS короткой схемы, текущая при измерении потерь короткой схемы.
Зависимости
Чтобы включить этот параметр, установите Iron-loss на Empirical.
Механическое устройство
Rotor inertia — Инерция ротора
0.01
kg*m^2 (значение по умолчанию)
Инерция ротора присоединяется к механическому поступательному порту R. Значение может быть нулем.
Rotor damping — Затухание ротора
0 N*m/(rad/s) (значение по умолчанию)
Температурная зависимость
Эти параметры появляются только для блоков с осушенными тепловыми портами. Для получения дополнительной информации смотрите Тепловые Порты.
Measurement temperature — Температура измерения
298.15 K (значение по умолчанию)
Температура, для которой заключаются в кавычки параметры двигателя.
Resistance temperature coefficient — Коэффициент температуры сопротивления
3.93e-3
1/K (значение по умолчанию)
Коэффициент α в сопротивлении связи уравнения температуре, как описано в Тепловой Модели для Блоков Привода. Значение по умолчанию для меди.
Permanent magnet flux temperature coefficient — Коэффициент температуры потока постоянного магнита
-0.001 1/K (значение по умолчанию)
Дробная скорость изменения плотности потока постоянного магнита с температурой. Это используется, чтобы линейно уменьшать крутящий момент и вызванный коэффициент противо-ЭДС, когда температура повышается.
Тепловой порт
Эти параметры появляются только для блоков с осушенными тепловыми портами. Для получения дополнительной информации смотрите Тепловые Порты.
Thermal mass for each stator winding — Количество тепла для каждой обмотки статора
100 J/K (значение по умолчанию)
Значение количества тепла для A, B, и обмотки C. Количество тепла является энергией, требуемой для повышения температуры на один градус.
Rotor thermal mass — Количество тепла ротора
200 J/K (значение по умолчанию)
Количество тепла ротора, то есть, энергия, требуемая повысить температуру ротора одной степенью.
Percentage of main flux path iron losses associated with the rotor — Процент основных потерь в железе пути к потоку сопоставлен с ротором
90
Процент основных потерь в железе пути к потоку сопоставлен с магнитным путем через ротор. Это определяет, сколько из нагревания потери в железе приписано ротору тепловой порт HR, и сколько приписано трем извилистым тепловым портам HA, HB и HC.
Зависимости
Чтобы включить этот параметр, установите Iron-loss на Empirical.
Percentage of cross-tooth flux path iron losses associated with the rotor — Процент перекрестных зубных потерь в железе пути к потоку сопоставлен с ротором
30
Процент перекрестных зубных потерь в железе пути к потоку сопоставлен с магнитным путем через ротор. Это определяет, сколько из нагревания потери в железе приписано ротору тепловой порт HR, и сколько приписано трем извилистым тепловым портам HA, HB и HC.
Зависимости
Чтобы включить этот параметр, установите Iron-loss на Empirical.
Ссылки
[1] Kundur, P. Устойчивость энергосистемы и управление. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, пополудни анализ неработающих энергосистем. Хобокен, NJ: нажатие Wiley-IEEE, 1995.
[3] Меллор, P.H., Р. Робель и Д. Холидей. “В вычислительном отношении эффективная модель потери в железе для бесщеточных машин AC, которая обслуживает расчетный поток и поле, ослабила операцию”. IEEE Электрическая Конференция по Машинам и Дискам. Май 2009.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Смотрите также
Блоки Simscape
Блоки
Введенный в R2013b