Настройте (дополнительную) валидацию
В приложениях для маркировки, checkSetup метод проверяет валидность настройки, когда вы нажимаете Run на сеансе автоматизации. Если checkSetup возвращает true, затем настройка допустима, и приложение продолжает запускать алгоритм автоматизации при помощи initializeзапущенный, и terminate методы.
Клиенты AutomationAlgorithm может опционально реализовать этот метод.
isReady = checkSetup(algObj,labelsToAutomate)labelsToAutomate, это содержит метки, выбранные для алгоритма автоматизации, чтобы использовать для маркировки. Этот синтаксис не поддерживает пиксельную автоматизацию метки. Кроме того, этот синтаксис доступен только для зависящих от времени (временных) алгоритмов автоматизации. Ground Truth Labeler (Automated Driving Toolbox) (требует Automated Driving Toolbox™), и поддержка приложений Video Labeler временные алгоритмы, но Image Labeler не делает. Для получения дополнительной информации об этих типах алгоритмов см. Временные Алгоритмы Автоматизации.
Метки выбраны для автоматизации в виде таблицы с этими столбцами.
| ColumnName | Описание | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
Type |
| ||||||||||
Name | Вектор символов, который содержит имя метки. | ||||||||||
Time | Скаляр типа double это задает время в секундах, когда метка была отмечена. | ||||||||||
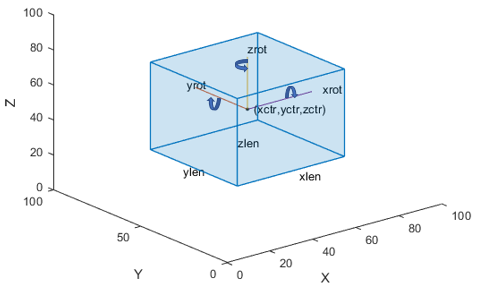
Position | Местоположение метки в системе координат. Формат этого вектора зависит от типа метки.
|
Каждая строка таблицы соответствует метке, выбранной для автоматизации. Этот labelsToAutomate таблица содержит прямоугольную метку, метку линии с пятью точками и метку кубоида.
Type Name Time Position
_________ ____________ _________ ____________
Rectangle 'Car' 0.033333 [1x4 double]
Line 'LaneMarker' 0.066667 [5x2 double]
Cuboid 'Truck' 0.099999 [1x9 double] checkLabelDefinition | checkSignalType | labelType | vision.labeler.AutomationAlgorithm