Реализуйте представление кватерниона шести уравнений степеней свободы движения массы простой переменной относительно осей ветра
Aerospace Blockset / уравнения Движения / 6DOF
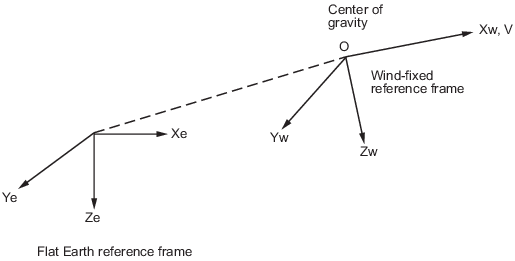
Блок Simple Variable Mass 6DOF Wind (Quaternion) реализует представление кватерниона шести уравнений степеней свободы движения массы простой переменной относительно осей ветра. Это рассматривает вращение зафиксированной ветром координатной системы координат (Xw, Yw, Zw) о плоской Наземной системе координат (Xe, Ye, Ze).
Aerospace Blockset™ использует кватернионы, которые заданы с помощью скалярного первого соглашения. Для получения дополнительной информации о зафиксированной ветром координатной системе координат см. Алгоритмы.
Блок принимает, что приложенные силы действуют в центре тяжести тела.
Источник зафиксированной ветром координатной системы координат является центром тяжести тела, и тело принято, чтобы быть твердым, предположение, которое избавляет от необходимости рассматривать силы, действующие между отдельными элементами массы. Плоская Наземная система координат рассматривается инерционной, превосходное приближение, которое позволяет силам из-за движения Земли относительно “фиксированных звезд” быть пропущенными.
Поступательное движение зафиксированной ветром координатной системы координат приведено ниже, где приложенные силы [финансовый год Fx Fz] T находятся в зафиксированной ветром системе координат. Vre w является относительной скоростью в осях ветра в который массовый поток () извлекается или добавляется к телу.
Вращательные движущие силы зафиксированной телом системы координат приведены ниже, где прикладными моментами является [L MN] T, и тензор инерции, I относительно источника O. Тензор инерции I намного легче задать в зафиксированной телом системе координат.
Тензор инерции определяется с помощью поиска по таблице, который линейно интерполирует между Ifull и Iempty на основе массы (m). В то время как скорость изменения тензора инерции оценивается следующим уравнением.
Интегрирование скорости изменения вектора кватерниона приведено ниже.
[1] Стивенс, Брайан и Франк Льюис. Управление самолетом и Симуляция, 2-й редактор Хобокен, NJ: John Wiley & Sons, 2003.
[2] Zipfel, Питер Х., Моделирование и Симуляция Космической Динамики аппарата. 2-й редактор Рестон, ВА: Образовательный Ряд AIAA, 2007.
6DOF (Euler Angles) | 6DOF (Quaternion) | 6DOF ECEF (Quaternion) | 6DOF Wind (Quaternion) | 6DOF Wind (Wind Angles) | Custom Variable Mass 6DOF (Euler Angles) | Custom Variable Mass 6DOF (Quaternion) | Custom Variable Mass 6DOF ECEF (Quaternion) | Custom Variable Mass 6DOF Wind (Quaternion) | Custom Variable Mass 6DOF Wind (Wind Angles) | Simple Variable Mass 6DOF (Euler Angles) | Simple Variable Mass 6DOF (Quaternion) | Simple Variable Mass 6DOF ECEF (Quaternion) | Simple Variable Mass 6DOF Wind (Wind Angles)
