Якобиан измерения функционирует для движения постоянного ускорения
measurementjac = cameasjac(state)state аргумент задает текущее состояние фильтра.
measurementjac = cameasjac(state,frame)frame.
measurementjac = cameasjac(state,frame,sensorpos)sensorpos.
measurementjac = cameasjac(state,frame,sensorpos,sensorvel)sensorvel.
measurementjac = cameasjac(state,measurementParameters)measurementParameters.
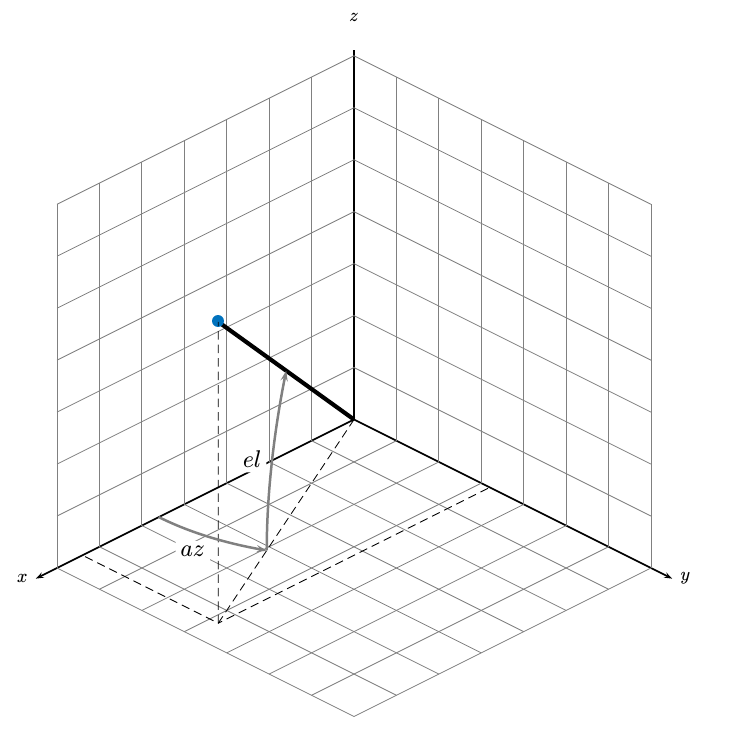
Задайте азимут и углы возвышения, используемые в тулбоксе.
azimuth angle вектора является углом между x - ось и ее ортогональной проекцией на плоскость xy. Угол положителен в движении от оси x к оси y. Углы азимута находятся между –180 и 180 градусами. elevation angle является углом между вектором и его ортогональной проекцией на xy - плоскость. Угол положителен при движении к положительному z - ось от плоскости xy.
cameas | constacc | constaccjac | constturn | constturnjac | constvel | constveljac | ctmeas | ctmeasjac | cvmeas | cvmeasjac