Симулируйте сохраняющую маршрут помощь с помощью адаптивной модели прогнозирующий контроллер
Model Predictive Control Toolbox / Автоматизированное Управление
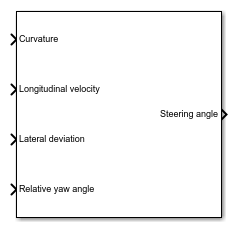
Блок Lane Keeping Assist System симулирует систему хранения маршрута помогает (LKA), которая сохраняет автомобиль, оборудованный датчиком, перемещающийся вдоль центра прямой или изогнутой дороги путем корректировки переднего руководящего угла. Контроллер уменьшает боковое отклонение и относительный угол рыскания автомобиля, оборудованного датчиком относительно средней линии маршрута. Блок вычисляет действия оптимального управления при удовлетворении держащимся угловым ограничениям с помощью адаптивной модели прогнозирующее управление (MPC).

Чтобы настроить ваш контроллер, например, использовать усовершенствованные функции MPC или изменить начальные условия контроллера, нажимают Create LKA subsystem.
Curvature — Дорожное искривлениеДорожное искривление в виде 1/R, где R является радиусом кривой в метрах.
Дорожное искривление:
Положительный, когда дорога изгибается к положительной оси Y глобальной системы координат.
Отрицательный, когда дорога изгибается к отрицательной оси Y глобальной системы координат.
Нуль для прямой дороги.
Модели контроллеров дорожное искривление как измеренное воздействие с предварительным просмотром. Можно задать искривление как a:
Скалярный сигнал — Задает искривление для текущего контрольного интервала. Диспетчер использует это значение искривления через горизонт предсказания.
Векторный сигнал с длиной, меньше чем или равной Prediction Horizon — Задает текущие и предсказанные значения искривления через горизонт предсказания. Если длина вектора меньше горизонта предсказания, то диспетчер использует итоговое значение искривления в векторе для остатка от горизонта предсказания.
Longitudinal velocity — Скорость автомобиля, оборудованного датчикомСкорость автомобиля, оборудованного датчиком в m/s.
Lateral deviation — Отклонение ответвления автомобиля, оборудованного датчикомОтклонение ответвления автомобиля, оборудованного датчиком в метрах от средней линии маршрута.
Relative yaw angle — Угол от средней линии маршрутаАвтомобиль, оборудованный датчиком продольный угол оси в радианах от средней линии маршрута.
Minimum steering angle — Минимальный передний руководящий уголМинимальное переднее руководящее угловое ограничение в радианах. Используйте этот входной порт, когда минимальный руководящий угол будет варьироваться во время выполнения.
Чтобы включить этот порт, выберите Use external source для параметра Minimum steering angle.
Maximum steering angle — Максимальный передний руководящий уголМаксимальное переднее руководящее угловое ограничение в радианах. Используйте этот входной порт, когда максимальный руководящий угол будет варьироваться во время выполнения.
Чтобы включить этот порт, выберите Use external source для параметра Maximum steering angle.
Enable optimization — Оптимизация контроллера включает сигналОптимизация контроллера включает сигнал. Когда этот сигнал:
Ненулевой, контроллер выполняет вычисления оптимизации и генерирует управляющий сигнал Steering angle.
Нуль, контроллер не выполняет вычисления оптимизации. В этом случае выходной сигнал Steering angle остается в значении, которое он имел, когда оптимизация была отключена. Контроллер продолжает обновлять его оценки внутреннего состояния.
Чтобы включить этот порт, выберите параметр Use external signal to enable or disable optimization.
External control signal — Регулирование угла применилось к автомобилю, оборудованному датчикомФактический руководящий угол в радианах применился к автомобилю, оборудованному датчиком. Диспетчер использует этот сигнал оценить состояния модели автомобиля, оборудованного датчиком. Используйте этот входной порт, когда управляющий сигнал применился к автомобилю, оборудованному датчиком, не совпадает с сигналом оптимального управления, вычисленным прогнозирующим контроллером модели. Это несоответствие может произойти когда, например:
Lane Keeping Assist System не является активным контроллером. Поддержание точной оценки состояния, когда контроллер не активен, предотвращает удары в управляющем сигнале, когда контроллер становится активным.
Держащиеся сбои привода и не предоставляют правильный управляющий сигнал автомобилю, оборудованному датчиком.
Чтобы включить этот порт, выберите параметр Use external control signal for bumpless transfer between PFC and other controllers.
Vehicle dynamics matrix A — Матрица состояния прогнозной модели автомобиля, оборудованного датчикомМатрица состояния прогнозной модели автомобиля, оборудованного датчиком. Количество строк в матрице состояния соответствует количеству состояний в прогнозной модели. Эта матрица должна быть квадратной.
Прогнозная модель автомобиля, оборудованного датчиком, заданная Vehicle dynamics matrix A, Vehicle dynamics matrix B и Vehicle dynamics matrix C, должна быть минимальной.
Чтобы включить этот порт, выберите параметр Use vehicle model.
Vehicle dynamics matrix B — Матрица входа к состоянию прогнозной модели автомобиля, оборудованного датчикомМатрица входа к состоянию прогнозной модели автомобиля, оборудованного датчиком. Количество строк в этом сигнале должно совпадать с количеством строк в Vehicle dynamics matrix A.
Прогнозная модель автомобиля, оборудованного датчиком, заданная Vehicle dynamics matrix A, Vehicle dynamics matrix B и Vehicle dynamics matrix C, должна быть минимальной.
Чтобы включить этот порт, выберите параметр Use vehicle model.
Vehicle dynamics matrix C — Состояние к выходной матрице прогнозной модели автомобиля, оборудованного датчикомСостояние к выходной матрице прогнозной модели автомобиля, оборудованного датчиком. Количество столбцов в этом сигнале должно совпадать с количеством строк в Vehicle dynamics matrix A.
Прогнозная модель автомобиля, оборудованного датчиком, заданная Vehicle dynamics matrix A, Vehicle dynamics matrix B и Vehicle dynamics matrix C, должна быть минимальной.
Чтобы включить этот порт, выберите параметр Use vehicle model.
Steering angle — Передний руководящий угловой управляющий сигналПередний руководящий угловой управляющий сигнал в радианах сгенерирован контроллером. Передний руководящий угол является углом передних шин от продольной оси транспортного средства. Держащийся угол положителен к положительной боковой оси автомобиля, оборудованного датчиком.
Use vehicle parameters — Задайте модель автомобиля, оборудованного датчиком использование свойств транспортного средстваon (значение по умолчанию) | offВыберите этот параметр, чтобы задать модель автомобиля, оборудованного датчиком, используемую контроллером MPC путем определения свойств автомобиля, оборудованного датчиком. Модель автомобиля, оборудованного датчиком является линейной моделью от переднего руководящего угла до поперечной скорости и углового уровня рыскания. Для получения дополнительной информации смотрите Прогнозную модель Автомобиля, оборудованного датчиком.
Чтобы задать модель транспортного средства, задайте следующие параметры блоков:
Total mass
Yaw moment of inertia
Longitudinal distance from center of gravity to front tires
Longitudinal distance from center of gravity to rear tires
Cornering stiffness of front tires
Cornering stiffness of rear tires
Для получения дополнительной информации о модели автомобиля, оборудованного датчиком смотрите Прогнозную модель Автомобиля, оборудованного датчиком.
Выбор этого параметра очищает параметр Use vehicle model.
Параметры блоков:
ModelType |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"Use vehicle parameters" |
Use vehicle model — Задайте модель автомобиля, оборудованного датчиком, использующую матрицы пространства состоянийoff (значение по умолчанию) | onВыберите этот параметр, чтобы задать матрицы пространства состояний модели автомобиля, оборудованного датчиком, используемой контроллером MPC. Эта модель является линейной моделью от переднего руководящего угла в радианах к поперечной скорости в метрах в секунду и угловом уровне рыскания в радианах в секунду. Для получения дополнительной информации о модели автомобиля, оборудованного датчиком смотрите Прогнозную модель Автомобиля, оборудованного датчиком.
Чтобы задать первоначальную внутреннюю модель, задайте A, B и матрицы пространства состояний C. Внутренняя модель должна быть минимальной реализацией без прямого сквозного соединения и размерностями A, B, и C должен быть сопоставимым.
Как правило, руководящая модель автомобиля, оборудованного датчиком зависима скоростью, и поэтому, она варьируется в зависимости от времени. Чтобы обновить внутреннюю модель во время выполнения, используйте Vehicle dynamics A, Vehicle dynamics B и входные порты Vehicle dynamics C.
Выбор этого параметра очищает параметр Use vehicle parameters.
Параметры блоков:
ModelType |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"Use vehicle parameters" |
Total mass — Масса автомобиля, оборудованного датчикомМасса автомобиля, оборудованного датчиком в kg.
Чтобы включить этот параметр, выберите параметр Use vehicle parameters.
Параметры блоков:
VehicleMass |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"1575" |
Yaw moment of inertia — Момент инерции об автомобиле, оборудованном датчиком вертикальная осьМомент инерции об автомобиле, оборудованном датчиком вертикальная ось в Kg · m2.
Чтобы включить этот параметр, выберите параметр Use vehicle parameters.
Параметры блоков:
VehicleYawInertia |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"2875" |
Longitudinal distance from center of gravity to front tires — Расстояние от центра автомобиля, оборудованного датчиком массы к его передним шинамРасстояние от центра автомобиля, оборудованного датчиком массы к его передней стороне утомляется в метрах, измеренных вдоль продольной оси транспортного средства.
Чтобы включить этот параметр, выберите параметр Use vehicle parameters.
Параметры блоков:
LengthToFront |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"1.2" |
Longitudinal distance from center of gravity to rear tires — Расстояние от центра автомобиля, оборудованного датчиком массы к его задним шинамРасстояние от центра автомобиля, оборудованного датчиком массы к его задним шинам в метрах, измеренных вдоль продольной оси транспортного средства.
Чтобы включить этот параметр, выберите параметр Use vehicle parameters.
Параметры блоков:
LengthToRear |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"1.6" |
Cornering stiffness of front tires — Передняя жесткость шиныПередняя жесткость шины в N/rad, заданном как отношение между стороной, обеспечивает на передних шинах и углу шин к продольной оси транспортного средства.
Чтобы включить этот параметр, выберите параметр Use vehicle parameters.
Параметры блоков:
FrontTireStiffness |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"19000" |
Cornering stiffness of rear tires — Жесткость задней шиныЖесткость задней шины в N/rad, заданном как отношение между стороной, обеспечивает на задних шинах и углу шин к продольной оси транспортного средства.
Чтобы включить этот параметр, выберите параметр Use vehicle parameters.
Параметры блоков:
RearTireStiffness |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"33000" |
A — Матрица начального состояния прогнозной модели автомобиля, оборудованного датчикомМатрица начального состояния прогнозной модели автомобиля, оборудованного датчиком. Количество строк в матрице состояния соответствует количеству состояний в прогнозной модели. Эта матрица должна быть квадратной.
Начальная прогнозная модель автомобиля, оборудованного датчиком, заданная A, B и C, должна быть минимальной.
Как правило, модель автомобиля, оборудованного датчиком варьируется в зависимости от времени. Чтобы обновить матрицу состояния во время выполнения, используйте входной порт Vehicle dynamics A.
Чтобы включить этот параметр, выберите параметр Use vehicle model.
Параметры блоков:
EgoModelMatrixA |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"[-4.4021 ,-12.4603;1.3913,-5.1868]" |
B — Начальная матрица входа к состоянию прогнозной модели автомобиля, оборудованного датчикомНачальная матрица входа к состоянию прогнозной модели автомобиля, оборудованного датчиком. Количество строк в этом параметре должно совпадать с количеством строк в A.
Начальная прогнозная модель автомобиля, оборудованного датчиком, заданная A, B и C, должна быть минимальной.
Как правило, модель автомобиля, оборудованного датчиком варьируется в зависимости от времени. Чтобы обновить матрицу входа к состоянию во время выполнения, используйте входной порт Vehicle dynamics B.
Чтобы включить этот параметр, выберите параметр Use vehicle model.
Параметры блоков:
EgoModelMatrixB |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"[24.1270;15.8609]" |
C — Начальное состояние к выходной матрице прогнозной модели автомобиля, оборудованного датчикомНачальное состояние к выходной матрице прогнозной модели автомобиля, оборудованного датчиком. Количество столбцов в этом параметре должно совпадать с количеством строк в A.
Начальная прогнозная модель автомобиля, оборудованного датчиком, заданная A, B и C, должна быть минимальной.
Как правило, модель автомобиля, оборудованного датчиком варьируется в зависимости от времени. Чтобы обновить состояние к выходной матрице во время выполнения, используйте входной порт Vehicle dynamics C.
Чтобы включить этот параметр, выберите параметр Use vehicle model.
Параметры блоков:
EgoModelMatrixC |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"[1,0;0,1]" |
Initial longitudinal velocity — Начальная скорость автомобиля, оборудованного датчикомНачальная скорость модели автомобиля, оборудованного датчиком, когда хранение маршрута помогают, включена в m/s. Эта скорость может отличаться от фактической скорости начальной буквы автомобиля, оборудованного датчиком.
Примечание
Очень маленькая начальная скорость, например, eps, может произвести неминимальную реализацию для модели объекта управления контроллера, вызвав ошибку. Чтобы предотвратить эту ошибку, установите начальную скорость на большее значение, например, 1e-3.
Параметры блоков:
InitialLongVel |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"15" |
Transport lag between model inputs and outputs — Общая транспортная задержка в модели автомобиля, оборудованного датчикомОбщая транспортная задержка, τ, в модели автомобиля, оборудованного датчиком в секундах. Эта задержка включает привод, датчик и коммуникационные задержки. Для каждого канала ввода-вывода транспортная задержка аппроксимирована:
Параметры блоков:
TransportLag |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"0" |
Minimum steering angle — Минимальный передний руководящий угол-pi/2 и pi/2Минимальное переднее руководящее угловое ограничение в радианах.
Если минимальный руководящий угол варьируется в зависимости от времени, добавьте входной порт Minimum steering angle в блок путем выбора Use external source.
Этот параметр должен быть меньше параметра Maximum steering angle.
Параметры блоков:
MinSteering |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"-0.26" |
Maximum steering angle — Максимальный передний руководящий угол-pi/2 и pi/2Максимальное переднее руководящее угловое ограничение в радианах.
Если максимальный руководящий угол варьируется в зависимости от времени, добавьте входной порт Maximum steering angle в блок путем выбора Use external source.
Этот параметр должен быть больше параметра Minimum steering angle.
Параметры блоков:
MaxSteering |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"0.26" |
Sample time — Шаг расчета контроллераШаг расчета контроллера в секундах.
Параметры блоков:
Ts |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"0.1" |
Prediction horizon — Горизонт предсказания контроллераШаги горизонта предсказания контроллера. Время предсказания контроллера является продуктом шага расчета и горизонта предсказания.
Параметры блоков:
PredictionHorizon |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"30" |
Controller behavior — Эффективность контроллера с обратной связью0 и 1Эффективность контроллера с обратной связью. Значение параметров по умолчанию обеспечивает сбалансированное проектирование контроллера. Определение a:
Меньшее значение производит более устойчивый контроллер с более сглаженными действиями управления.
Большее значение производит более агрессивный контроллер с более быстрым временем отклика.
Когда вы изменяете этот параметр, изменение сразу применяется к контроллеру.
Параметры блоков:
ControllerBehavior |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"0.5" |
Use suboptimal solution — Примените субоптимальное решение после конкретного количества итерацийoff (значение по умолчанию) | onСконфигурируйте контроллер, чтобы применить субоптимальное решение после заданного максимального количества итераций, которое гарантирует время выполнения худшего случая для вашего контроллера.
Для получения дополнительной информации смотрите Субоптимальное Решение QP.
После выбора этого параметра задайте параметр Maximum iteration number.
Параметры блоков:
suboptimal |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"off" |
Maximum iteration number — Максимальные итерации оптимизацииМаксимальное количество итераций оптимизации контроллера.
Чтобы включить этот параметр, выберите параметр Use suboptimal solution.
Параметры блоков:
maxiter |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"10" |
Use external signal to enable or disable optimization — Добавьте порт для включения оптимизацииoff (значение по умолчанию) | onЧтобы добавить входной порт Enable optimization в блок, выберите этот параметр.
Параметры блоков:
optmode |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"off" |
Use external signal for bumpless transfer between LKA and other controllers — Добавьте входной порт сигнала внешнего управленияoff (значение по умолчанию) | onЧтобы добавить входной порт External control signal в блок, выберите этот параметр.
Параметры блоков:
trackmode |
| Ввод: строка, вектор символов |
Значение по умолчанию:
"off" |
Create LKA subsystem — Создайте пользовательский контроллерСгенерируйте пользовательскую подсистему LKA, которую можно изменить для приложения. Данные о настройке контроллера для пользовательского контроллера экспортированы в рабочую область MATLAB® как структура.
Можно изменить пользовательскую подсистему контроллера к:
Измените настройки MPC по умолчанию или используйте, усовершенствовал функции MPC.
Измените начальные условия контроллера по умолчанию.
Прогнозная модель автомобиля, оборудованного датчиком по умолчанию является следующей моделью в пространстве состояний:
Здесь:
VX является продольной скоростью автомобиля. В начале симуляции эта скорость равна параметру Initial condition for longitudinal velocity. Во время выполнения эта скорость равна входному сигналу Longitudinal velocity.
m является параметром Total mass.
IZ является параметром Yaw moment of inertia.
LF является параметром Longitudinal distance from center of gravity to front tires.
LR является параметром Longitudinal distance from center of gravity to rear tires.
CF является параметром Cornering stiffness of front tires.
CR является параметром Cornering stiffness of rear tires.
Вход к этой модели является держащимся углом в радианах, и выходные параметры являются поперечной скоростью в метрах в секунду и угловом уровне рыскания в радианах в секунду.
Чтобы задать различную прогнозную модель автомобиля, оборудованного датчиком, выберите параметр Use vehicle model и задайте начальную модель в пространстве состояний. Затем задайте значения во время выполнения матриц пространства состояний с помощью Vehicle dynamics A, Vehicle dynamics B и входных сигналов Vehicle dynamics C.
Контроллер создает его внутреннюю прогнозную модель путем увеличения динамической модели автомобиля, оборудованного датчиком. Увеличенная модель включает дорожное искривление как измеренный входной сигнал воздействия.
По умолчанию прогнозирующий контроллер модели принимает следующие начальные условия для автомобиля, оборудованного датчиком:
Продольная скорость равна параметру Initial longitudinal velocity.
Поперечная скорость является нулем.
Регулирование угла является нулем.
Угловой уровень рыскания является нулем.
Если начальные условия в вашей модели не совпадают с этими условиями, Steering angle, выход может показать начальный удар в начале симуляции.
Чтобы изменить начальные условия контроллера, чтобы совпадать с вашей симуляцией, создайте пользовательскую сохраняющую маршрут систему управления, на вкладке Block, нажатие по Create LKA subsystem.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.


