Цикл, формирующий проект с помощью метода Перчаточника-McFarlane
ncfsyn реализует метод для разработки контроллеров, который использует комбинацию формирования цикла и устойчивой стабилизации, как предложено в [1]-[2]. Функция вычисляет Перчаточника-McFarlane, H ∞ нормировал взаимно-простой факторный формирующий цикл контроллер K для объекта G с весами предварительного компенсатора и посткомпенсатора W 1 и W 2. Функция принимает настройку положительной обратной связи следующего рисунка.
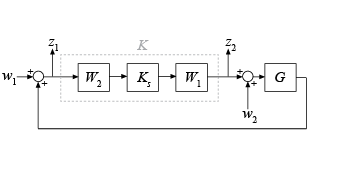
Чтобы задать отрицательную обратную связь, замените G –G. Контроллер Ks стабилизирует семейство систем, данное мячом неопределенности в нормированных взаимно-простых факторах имеющего форму объекта Gs = W 2GW1. Итоговый контроллер K, возвращенный ncfsyn получен как K = W 1KsW2.
[ вычисляет Перчаточника-McFarlane, H ∞ нормировал взаимно-простой факторный формирующий цикл контроллер K,CL,gamma,info] = ncfsyn(G)K для объекта G, с W 1 = W 2 = I. CL система с обратной связью от воздействий w 1 и w 2 к выходным параметрам z 1 и z 2. Функция также возвращает H ∞ эффективность gamma, и структура, содержащая дополнительную информацию о результате.
ncfsynИспользуйте ncfsyn спроектировать контроллер для следующего объекта.
G = tf([1 5],[1 2 10]);
Используйте функции взвешивания, которые дают к имеющему форму объекту W1*G*W2 с высоким усилением для затухания воздействия ниже 0,1 рад/с и низким усилением для хорошей устойчивой устойчивости выше приблизительно 5 рад/с. Для этого G, один только вес перед компенсатором достаточен.
W1 = tf(1,[1 0]); bodemag(W1*G) grid

Вычислите контроллер.
[K,CL,gamma,info] = ncfsyn(G,W1);
Оптимальная стоимость gamma связан с нормированным взаимно-простым запасом устойчивости системы 1/gamma = ncfmargin(Gs,-Ks). (Знак "минус" необходим потому что ncfmargin принимает цикл отрицательной обратной связи, в то время как ncfsyn вычисляет контроллер положительной обратной связи.)
b = ncfmargin(info.Gs,-info.Ks); [gamma 1/b]
ans = 1×2
1.4508 1.4508
Сравните достигнутые и целевые формы цикла.
sigma(G*K,G*W1) legend('achieved','target')

В то время как ncfmargin принимает цикл отрицательной обратной связи, ncfsyn команда проектирует контроллер для цикла положительной обратной связи. Поэтому вычислить поле с помощью контроллера, спроектированного с ncfsyn, используйте [marg,freq] = ncfmargin(G,K,+1).
Возвращенный K контроллера = W 1KsW2, где Ks является оптимальный H ∞ контроллер, который минимизирует H ∞ стоимость
Оптимальная эффективность является минимальной стоимостью
Предположим, что Gs =NM–1, где N (jω) *N (jω) + M (jω) *M (jω) = I, является нормированной взаимно-простой факторизацией (NCF) взвешенной модели объекта управления Gs. Затем теория гарантирует, что система управления остается надежно устойчивой для любого возмущения к Gs формы
где Δ1, Δ2 являются устойчивым парным удовлетворением
Цель -нормы H с обратной связью имеет стандартную интерпретацию усиления сигнала. Наконец можно показать, что контроллер, Ks, существенно не влияет на форму цикла в частотах, где усиление W 2GW1 или высоко или низко и гарантирует удовлетворительные запасы устойчивости в области частоты перекрестного соединения усиления. В настройке регулятора итоговый контроллер, который будет реализован, является K =W1KsW2.
[1] Макфарлэйн, округ Колумбия и K. Перчаточник, Устойчивое Проектирование контроллера с помощью Нормализованных Взаимно-простых Факторных Описаний Объекта, Springer Verlag, Примечаний Лекции в Управлении и Информатике, издании 138, 1989.
[2] Макфарлэйн, округ Колумбия и K. Перчаточник, “Цикл, Формирующий Методику проектирования с помощью Синтеза”, Транзакции IEEE на Автоматическом управлении, издании 37, № 6, стр 759 - 769, июнь 1992.
[3] Vinnicombe, G., “Измеряя Робастность Систем с обратной связью”, диссертация доктора философии, Отдел Разработки, Кембриджский университет, 1993.
[4] Чжоу, K., и Дж.К. Дойл, основы устойчивого управления. Нью-Йорк: Prentice Hall, 1998.
