Когда у вас есть программное обеспечение Simulink® Control Design™, можно вычислить неопределенную линеаризацию, i.e., неопределенная модель в пространстве состояний (uss) объединение неопределенных переменных с линеаризовавшей динамикой. Используйте uss модель, чтобы выполнить линейный анализ и устойчивую систему управления.
Можно вычислить неопределенную линеаризацию одним из следующих способов:
Используя ulinearize команда, как описано в Получают Неопределенную Модель в пространстве состояний из Модели Simulink.
Используя Simulink Control Design
linearize (Simulink Control Design) команда, как описано в Задают Неопределенную Линеаризацию для Базовых или Пользовательских блоков Simulink.
Чтобы получить неопределенную модель в пространстве состояний из модели, которая содержит блоки Uncertain State Space, используйте следующие шаги:
Примечание
Если вы не имеете блоков Uncertain State Space в модели, но все еще хотите получить неопределенную модель в пространстве состояний, смотрите, Задают Неопределенную Линеаризацию для Базовых или Пользовательских блоков Simulink.
(Необходимое условие) Создает или открывает модель Simulink.
(Необходимое условие) В модели Simulink, задайте точки ввода и вывода линеаризации с помощью Simulink Control Design
getlinio или linio команды. Для получения дополнительной информации смотрите, Задают Фрагмент Модели, чтобы Линеаризовать (Simulink Control Design).
(Необходимое условие), Если вы уже не сделали так, указывает, что неопределенность в модели Simulink как описано в Задает Неопределенность Используя Неопределенные Блоки Пространства состояний.
Примечание
Программное обеспечение не оценивает неопределенные переменные во время линеаризации. Таким образом значение неопределенности не влияет на линеаризацию.
Запущенный ulinearize вычислить неопределенную линеаризацию. Эта команда возвращает uss модель.
Примечание
Если вы используете Simulink Control Design
linearize (Simulink Control Design) управляет, блоки Uncertain State Space линеаризуют к их номинальной стоимости.
Для получения дополнительной информации о линеаризации и как оценить результаты, смотрите Основы Линеаризации (Simulink Control Design).
Для примера того, как использовать Simulink Control Design
linearize (Simulink Control Design) команда, смотрите Линеаризацию Моделей Simulink с Неопределенностью.
В некоторых случаях вы не можете использовать блоки Uncertain State Space в модели Simulink, потому что вы совместно используете модель или генерируете код. Можно все еще считать по причине неопределенности в линейном анализе, не задавая неопределенность с помощью блоков Uncertain State Space. Robust Control Toolbox™ позволяет вам задать базовый или пользовательский блок Simulink, чтобы линеаризовать к неопределенной переменной. Линеаризация производит неопределенное пространство состояний uss модель. Заданная неопределенность сопоставляет только с блоком и не влияет на симуляцию модели. Для получения дополнительной информации смотрите, Задают Линейную систему для Линеаризации Блока Используя Выражение MATLAB (Simulink Control Design).
Примечание
Если вы имеете блоки Uncertain State Space в модели и хотите получить неопределенную модель в пространстве состояний, смотрите, Получают Неопределенную Модель в пространстве состояний из Модели Simulink.
Задавать блоки, чтобы линеаризовать к неопределенным переменным и получить неопределенную модель в пространстве состояний:
(Необходимые условия) Создают или открывают модель Simulink. Задайте точки ввода и вывода линеаризации с помощью Simulink Control Design
getlinio или linio команды.
В данном примере можно открыть модель rct_ulinearize_builtin.
Задайте блок, чтобы линеаризовать к неопределенной переменной:
Щелкните правой кнопкой по блоку и выберите Linear Analysis> Specify Selected Block Linearization.
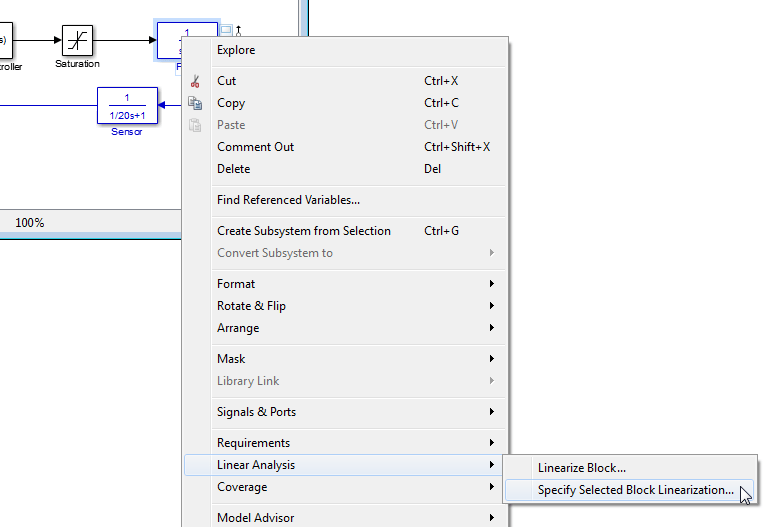
Это действие открывает диалоговое окно Block Linearization Specification.
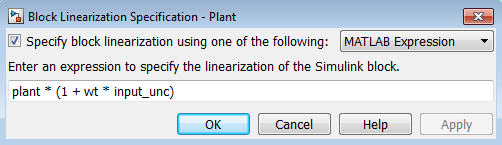
В диалоговом окне Block Linearization Specification выберите линеаризацию блока Specify с помощью одного из следующего: флажок. Установка этого флажка позволяет вам, чтобы задать неопределенную переменную для линеаризации.
Этот флажок значения по умолчанию к MATLAB Expression в выпадающем меню. Эта опция позволяет вам задать блок, чтобы линеаризовать к неопределенной переменной с помощью выражения MATLAB®, содержащего функции Robust Control Toolbox. Чтобы узнать больше об опциях, смотрите, Задают Линейную систему для Линеаризации Блока Используя Выражение MATLAB (Simulink Control Design).
Во Введении выражения, чтобы задать линеаризацию поля блока Simulink, введите выражение, которое должно оценить к неопределенной переменной или неопределенной модели, такой как ureal, umat, ultidyn, umargin, или uss.
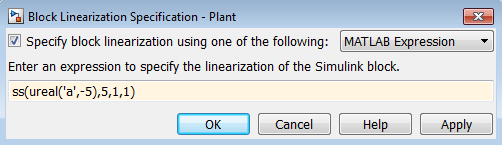
Нажмите ОК, чтобы сохранить изменения.
Примечание
Можно также задать блок, чтобы линеаризовать к неопределенной переменной в командной строке. Для примера смотрите, Линеаризуют блок Simulink к Неопределенной Модели.
Запустите linearize команда, чтобы вычислить неопределенную линеаризацию. Эта команда возвращается uss модель.
Для получения дополнительной информации о линеаризации и как подтвердить результаты линеаризации, смотрите Основы Линеаризации (Simulink Control Design).
Для примера того, как использовать linearize команда, чтобы вычислить неопределенную линеаризацию, смотрите Линеаризацию Моделей Simulink с Неопределенностью.
После вычисления неопределенной линеаризации можно выполнить любой анализ или спроектировать задачи, включая которые вы выполнили бы на любой линейной модели:
Выполните анализ робастности. Смотрите Анализ Робастности и Худшего Случая.
Выполните устойчивую систему управления. Смотрите, что Устойчивый Контроллер Настраивается.
ulinearize | linearize (Simulink Control Design)
