Эталонное приложение электромобиля представляет полную модель электромобиля с мотором-генератором, аккумулятором, трансмиссией с прямым приводом и соответствующими алгоритмами управления силовым агрегатом. Используйте эталонное приложение электромобиля для анализа согласования силового агрегата и выбора компонентов, проектирования алгоритмов управления и диагностики, а также тестирования оборудования в контуре (HIL). Для создания и открытия рабочей копии проекта эталонного приложения обычного транспортного средства введите
Эталонное приложение электромобиля сконфигурировано с отображенным двигателем и батареей. На этой схеме показана конфигурация силового агрегата.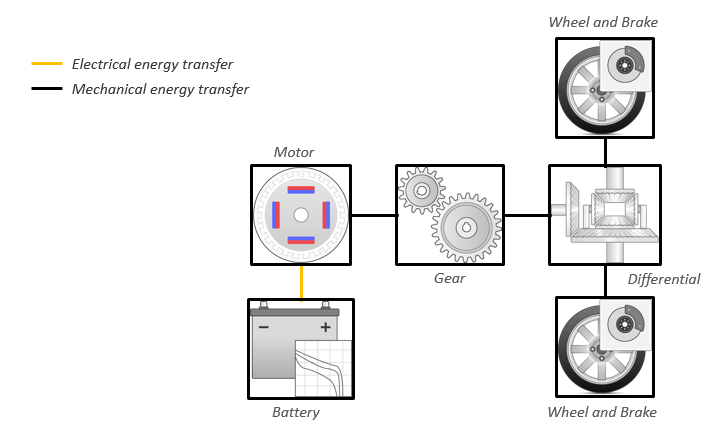
В этой таблице описываются блоки и подсистемы в справочном приложении, указывающие, какие подсистемы содержат варианты. Для реализации вариантов модели ссылочное приложение использует подсистемы вариантов.
| Ссылочный элемент приложения | Описание | Варианты |
|---|---|---|
Анализ мощности и энергии |
Дважды щелкните Анализ мощности и энергии, чтобы открыть сценарий в реальном времени. Запустите сценарий для оценки энергопотребления и энергопотребления на уровне компонентов и системы. Дополнительные сведения о сценарии в реальном времени см. в разделе Анализ мощности и энергии. | НА |
Блок источника цикла диска - FTP75 (2474 секунды) | Создание стандартного или заданного пользователем профиля скорости цикла привода в зависимости от времени. Выход блока - выбранная или заданная продольная скорость транспортного средства. | ✓ |
Environment подсистема | Создание переменных среды, включая уровень дороги, скорость ветра, температуру и давление в атмосфере. | |
Longitudinal Driver подсистема |
Для создания нормализованных команд ускорения и торможения используется вариант продольного привода или разомкнутого контура.
| ✓ |
Controllers подсистема | Реализует модуль управления силовым агрегатом (ИКМ) с рекуперативным торможением, арбитражем крутящего момента двигателя и управлением мощностью. | ✓ |
Passenger Car подсистема | Реализует легковой автомобиль, содержащий электроустановку и подсистемы трансмиссии. | ✓ |
Visualization подсистема | Отображает характеристики на уровне транспортного средства, состояние заряда аккумулятора (SOC) и результаты эквивалентной экономии топлива, которые полезны для согласования силового агрегата и анализа выбора компонентов. |
Дважды щелкните Анализ мощности и энергии, чтобы открыть сценарий в реальном времени. Запустите сценарий для оценки энергопотребления и энергопотребления на уровне компонентов и системы.
Сценарий обеспечивает:
Общая сводка по энергии, которую можно экспортировать в электронную таблицу Excel ®.
Эффективность электроустановки и трансмиссии.
Регистрация данных для использования инспектора данных моделирования для анализа эффективности силового агрегата и сигналов передачи энергии.
Дополнительные сведения о сценарии в реальном времени см. в разделе Анализ мощности и энергии.
Drive Cycle Source блок генерирует целевую скорость транспортного средства для выбранного или заданного цикла привода. Ссылочное приложение имеет эти опции.
| Выбор времени | Вариант | Описание |
|---|---|---|
Время вывода выборки |
| Непрерывные команды оператора |
| Разовые команды оператора |
Longitudinal Driver подсистема формирует нормированные команды ускорения и торможения. Ссылочное приложение имеет эти варианты.
Варианты блоков | Описание | ||
|---|---|---|---|
Продольный драйвер (по умолчанию) | Контроль |
| Управление PI с отслеживанием усиления и усиления прямой передачи, которые являются функцией скорости транспортного средства. |
| Оптимальный режим просмотра в одной точке (просмотр вперед). | ||
| Пропорционально-интегральное (PI) управление с подачей сигнала слежения и усилением подачи вперед. | ||
Фильтр нижних частот (LPF) |
| Используйте LPF для ошибки целевой скорости для более плавного движения. | |
| Не используйте фильтр при ошибке скорости. | ||
Изменение |
| Диаграмма Stateflow ® моделирует планирование переключения передач в обратном, нейтральном и ведущем направлениях. | |
| Входная передача, состояние транспортного средства и обратная связь скорости формируют команды ускорения и торможения для отслеживания движения транспортного средства вперед и назад. | ||
| Нет передачи. | ||
| Модели диаграммы статофлоу с обратным, нейтральным, парковым и N-ступенчатым переключением передач. | ||
Разомкнутый контур | Подсистема управления с разомкнутым контуром. В подсистеме можно настроить команды ускорения, замедления, передачи и сцепления с постоянными или сигнальными входами. | ||
Для определения крутящего момента двигателя и команд тормозного давления эталонное приложение реализует управляющий контроллер. В частности, подсистема контроллера включает в себя модуль управления силовым агрегатом (ИКМ) с:
Управление рекуперативным торможением
Арбитраж крутящего момента двигателя и управление мощностью
Преобразует сигнал педали акселератора водителя в запрос крутящего момента.
Преобразует сигнал педали тормоза водителя в запрос на давление тормоза. Алгоритм умножает сигнал педали тормоза на максимальное давление тормоза.
Реализует алгоритм рекуперативного торможения тягового двигателя для восстановления максимального количества кинетической энергии от транспортного средства.
Реализует виртуальную систему управления батареями. Алгоритм выводит пределы динамического разряда и мощности заряда в качестве функций состояния заряда батареи (SOC).
Реализует алгоритм управления питанием, обеспечивающий отсутствие превышения пределов динамического разряда и заряда батареи.
Regen Braking Control имеет эти варианты.
| Диспетчер | Вариант | Описание |
|---|---|---|
Повторное управление торможением | Series Regen Brake (по умолчанию) | Фрикционное торможение обеспечивает крутящий момент, не подаваемый рекуперативным торможением двигателя. |
Parallel Regen Braking | Фрикционное торможение и рекуперативное торможение двигателя независимо обеспечивают крутящий момент. |
Для реализации легкового автомобиля, Passenger Car подсистема содержит привод и подсистему электрической установки. Ссылочное приложение имеет эти варианты.
| Подсистема привода | Вариант | Описание | |
|---|---|---|---|
Дифференциал и соответствие требованиям | All Wheel Drive | Настройте привод для всего колеса, переднего колеса или привода заднего колеса. Для варианта с полным приводом можно настроить тип крутящего момента муфты. | |
Front Wheel Drive (по умолчанию) | |||
Rear Wheel Drive | |||
Транспортное средство | Vehicle Body 3 DOF Longitudinal | Настройка для 3 степеней свободы | |
Колеса и тормоза |
| Для штурвалов можно настроить тип:
Для обеспечения рабочих характеристик и ясности, чтобы определить продольную силу каждого колеса, варианты реализуют блок продольного колеса. Для определения общей продольной силы всех колес, действующих на ось, варианты используют масштабный коэффициент для умножения силы одного колеса на число колес на оси. Используя этот подход для расчета общей силы, варианты предполагают одинаковую проскальзывание шины и нагрузку на переднюю и заднюю оси, что является обычным для исследований продольного силового агрегата. Если это не так, например, когда трения или нагрузки различаются на левой и правой сторонах осей, используйте уникальные блоки продольного колеса для вычисления независимых сил. Однако использование уникальных блоков для моделирования каждого колеса увеличивает сложность модели и вычислительные затраты. | |
| |||
| Подсистема электроустановки | Вариант | Описание |
|---|---|---|
| Батарея |
| Конфигурация с электрической батареей |
| Двигатель |
| Сопоставленный двигатель с неявным контроллером |
| Внутренний синхронный двигатель постоянного магнита (PMSM) с контроллером |
Лист технических данных Аккумулятор | Источник цикла диска | Внутренний контроллер PM | Внутренняя PMSM | Продольный привод | Сопоставленный двигатель
