После создания модели архитектуры AUTOSAR начинается разработка верхнего уровня конструкции программного обеспечения AUTOSAR. Используйте редактор композиций и вкладку Simulink ® Toolstrip Modeling для добавления и подключения композиций и компонентов AUTOSAR.
На предыдущем шаге была открыта локальная папка рабочего примера и создана пустая модель архитектуры AUTOSAR. При необходимости повторите шаг, чтобы открыть рабочую папку и создать пустую модель.
![]()
При создании приложения управления положением дросселя можно обратиться к примеру модели autosar_tpc_composition, который показывает конечный результат.
Обычно композиция AUTOSAR содержит набор компонентов и композиций AUTOSAR с общей целью. В рамках создания приложения для управления положением дроссельной заслонки в данном учебном пособии четыре компонента датчиков помещаются в состав датчиков.
Для добавления состава датчиков и их компонентов в архитектурную модель AUTOSAR:
В холсте модели архитектуры добавьте блок «Программная композиция» и присвойте ему имя «Сенсоры». Например, на вкладке «Моделирование» выберите «Программная композиция» и вставьте в холст блок «Программная композиция». В выделенном поле имени введите Sensors.
Чтобы заполнить композицию, откройте блок Компоновка программного обеспечения (Software Composition) и добавьте блоки Компонент программного обеспечения (Software Component).
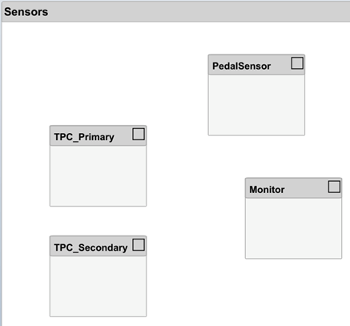
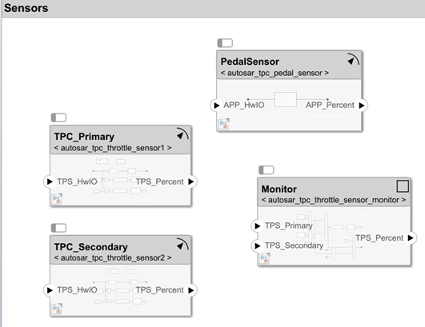
Откройте блок «Сенсоры», чтобы на холсте модели отображалось содержимое композиции. Добавьте в композицию программные компоненты AUTOSAR с именами TPS_Primary, TPS_Secondary, Monitor и PedalSensor. Например, на вкладке Моделирование (Modeling) можно выбрать Компонент программного обеспечения (Software Component) для создания каждого компонента.
Затем необходимо добавить требуемые и предоставляемые порты к компонентам, а затем подключить порты компонентов к другим блокам компонентов или к корневым портам компоновки. Чтобы добавить требуемый компонент и предоставить порты, в данном учебном пособии блоки компонентов программного обеспечения связываются с моделями реализации, в которых порты уже определены.
Поведение приложения AUTOSAR определяется его компонентами программного обеспечения AUTOSAR. После вставки блоков компонентов программного обеспечения в архитектурную модель AUTOSAR можно добавить поведение Simulink к компонентам. Для каждого блока компонентов программного обеспечения можно выполнить следующие действия:
Создайте модель на основе блочного интерфейса.
Ссылка на модель реализации.
Создайте модель из описания компонента AUTOSAR XML (ARXML).
Для удобства в данном учебном пособии представлена модель реализации Simulink для каждого компонента AUTOSAR:
autosar_tpc_throttle_sensor1.slx для TPS_Primary компонентов
autosar_tpc_throttle_sensor2.slx для TPS_Secondary компонентов
autosar_tpc_throttle_sensor_monitor.slx для компонента Монитор
autosar_tpc_pedal_sensor.slx для компонента PedalSensor
Чтобы добавить поведение Simulink к компонентам, выполните следующие действия.
В модели архитектуры откройте блок «Sensors composition», если он еще не открыт. Внутри композиции свяжите каждый компонент датчика AUTOSAR с моделью Simulink, реализующей его поведение.
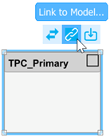
Например, выберите TPS_Primary блок компонента, наведите курсор на отображаемое многоточие и выберите «Связь с моделью».
В диалоговом окне «Связь с моделью» перейдите к модели реализации. autosar_tpc_throttle_sensor1.slx.
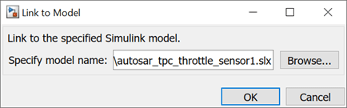
Чтобы связать компонент с моделью реализации, нажмите кнопку ОК.
Связывание компонентов TPS_Secondary, Monitor и PedalSensor с моделями реализации. После связывания каждой модели можно изменить размер связанного блока компонента для лучшего отображения портов компонента.
Связывание блока компонента программного обеспечения с указанной моделью реализации обновляет интерфейсы блока и модели. При связывании с моделью, в которой используются корневые блоки Inport и Outport, программа преобразует сигнальные порты модели в порты шины. Для просмотра содержимого модели откройте блок «Компонент программного обеспечения».
Соедините компоненты друг с другом и создайте корневые порты.
Чтобы соединить компоненты, перетащите линию из порта поставщика компонентов в другой порт получателя компонентов.
Чтобы соединить компоненты с корневыми портами композиции сенсоров, перетащите курсор с порта компонента на границу композиции сенсоров.
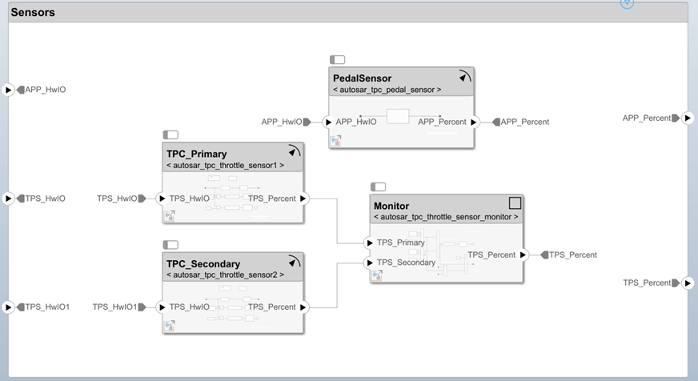
При необходимости, чтобы точно соответствовать именованию корневого порта в примере модели autosar_tpc_composition, переименование портов TPS_HwIO и TPS_HwIO1 кому TPS1_HwIO и TPS2_HwIO.
Для завершения применения управления положением дросселя:
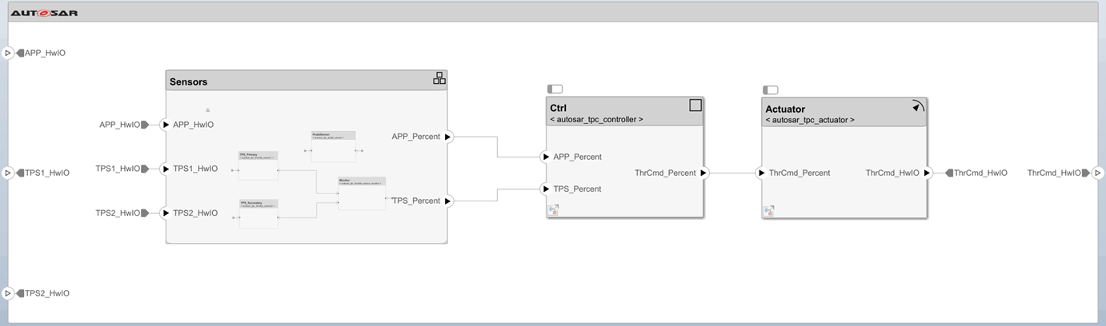
Вернитесь к верхнему уровню архитектурной модели. Добавьте два блока компонентов программного обеспечения и присвойте им имена Ctrl и Activ.
Свяжите компоненты AUTOSAR Ctrl и привод с их моделями реализации Simulink, autosar_tpc_controller.slx и autosar_tpc_actuator.slx.
Соедините состав датчиков, компонент Ctrl и компонент привода друг с другом и с границей модели архитектуры.
Чтобы проверить наличие проблем с интерфейсом или типом данных, обновите архитектурную модель. На вкладке Моделирование (Modeling) выберите Обновить модель (Update Model). Если какие-либо проблемы обнаружены, сравните модель с примером модели autosar_tpc_composition.
Сохранение модели с уникальным именем, например myTPC_Composition.slx.
Затем смоделируйте поведение агрегированных компонентов в архитектурной модели AUTOSAR.
