Запас усиления, запас фазы, запас задержки и переходные частоты
S = allmargin(L)L. Цикл отрицательной обратной связи вычисляется как feedback(L,eye(M)), где M - количество входов и выходов в L.
Для системы MIMO: allmargin возвращает пределы стабильности цикла в момент времени для системы замкнутого цикла с отрицательной обратной связью. Использовать allmargin найти классические поля любой модели SISO или MIMO, включая модели с задержками.
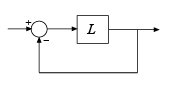
L - Отклик с разомкнутым контуромОтклик с разомкнутым контуром, заданный как динамическая модель системы. L может быть SISO или MIMO, если он имеет одинаковое количество входов и выходов. allmargin вычисляет классические пределы устойчивости для замкнутой системы с отрицательной обратной связью feedback(L,eye(M)):
Расчет пределов устойчивости системы положительной обратной связи feedback(L,eye(M),+1), использовать allmargin(-L).
При наличии контроллера P и растение C, можно вычислить пределы устойчивости для изменений коэффициента усиления и фазы на входах или выходах установки. Из следующей схемы:
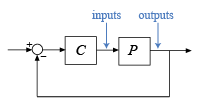
Для расчета маржи на заводских выходах установите L = P*C.
Для расчета маржи на заводских вводах установите L = C*P.
L может быть непрерывным временем или дискретным временем. Если L является обобщенной государственно-пространственной моделью (genss или uss), то allmargin использует текущее или номинальное значение всех блоков проекта управления в L.
Если L является моделью данных частотного отклика (например, frd), то allmargin вычисляет поля на каждой частоте, представленной в модели. Функция возвращает поля на частоте с наименьшим запасом устойчивости.
Если L является массивом модели, то allmargin вычисляет поля для каждой модели в массиве.
mag - Величина реакции системыВеличина отклика системы в абсолютных единицах, заданная как массив 3-D. mag - массив M-на-M-на-N, где M - количество входов или выходов, а N - количество частотных точек. Для получения дополнительной информации о получении mag, см. раздел Получение данных о величине и фазе, а также о величине и фазе системы MIMO.
phase - Фаза реакции системыФаза отклика системы в градусах, заданная как массив 3-D. phase - массив M-на-M-на-N, где M - количество входов или выходов, а N - количество частотных точек. Для получения дополнительной информации о получении phase, см. раздел Получение данных о величине и фазе, а также о величине и фазе системы MIMO.
w - Частоты, на которых получены величины и фазовые значения отклика системыЧастоты, на которых получают величину и фазовые значения отклика системы, заданные в виде вектора-столбца. Можно указать частотный вектор w в любых единицах; allmargin возвращает частоты в тех же единицах. allmargin интерполяция между частотными точками для аппроксимации истинных полей стабильности.
ts - Время выборкиВремя выборки, указанное как целое число. allmargin использование ts для поиска полей стабильности из данных частотной характеристики.
Для моделей непрерывного времени установите ts = 0.
Для дискретно-временных моделей ts - положительное целое число, представляющее период выборки. Для обозначения дискретно-временной модели с неопределенным временем выборки установите ts = -1.
allmargin предполагает, что система с откликом с разомкнутым контуром L является системой отрицательной обратной связи. Расчет классических пределов устойчивости системы положительной обратной связи feedback(L,eye(M),+1), использовать allmargin(-L).
Чтобы вычислить классические поля для системы, смоделированной в Simulink ®, сначала линеаризуйте модель, чтобы получить отклик с разомкнутым контуром в определенной рабочей точке. Затем используйтеallmargin для вычисления классических пределов устойчивости для линеаризованной системы. Дополнительные сведения см. в разделе Поля стабильности модели Simulink (надёжная панель инструментов управления).
Анализатор линейной системы | margin | diskmargin (инструментарий надежного управления)
