В этом примере показано, как задать единицы времени модели передаточной функции.
TimeUnit имущества tf объект модели определяет единицы временной переменной, временные задержки (для моделей непрерывного времени) и время выборки Ts (для моделей дискретного времени). Единицы времени по умолчанию: seconds.
Создайте модель функции передачи SISO 3s + 10 с единицами времени в миллисекундах:
num = [4 2]; den = [1 3 10]; sys = tf(num,den,'TimeUnit','milliseconds');
Аналогичным образом можно указать единицы времени любой динамической системы.
Единицы системного времени отображаются на графиках временной и частотной областей. Для нескольких систем с различными единицами времени единицы первой системы используются, если единицами времени и частоты в редакторе настроек панели инструментов являются auto.
Примечание
Изменение TimeUnit свойство изменяет поведение системы. Если необходимо использовать различные единицы времени без изменения поведения системы, используйте chgTimeUnit.
В этом примере показано, как соединять модели передаточных функций с различными единицами времени.
Для соединения моделей с помощью арифметических операций или команд соединения единицы времени всех моделей должны совпадать.
Создайте две модели передаточных функций с единицами времени в миллисекундах и секундах соответственно.
sys1 = tf([1 2],[1 2 3],'TimeUnit','milliseconds'); sys2 = tf([4 2],[1 3 10]);
Изменение единиц времени sys2 до миллисекунд.
sys2 = chgTimeUnit(sys2,'milliseconds');
Подсоедините системы параллельно.
sys = sys1+sys2;
В этом примере показано, как задать единицы частотных точек модели данных с частотным откликом.
FrequencyUnit свойство определяет единицы частотного вектора в Frequency имущества frd объект модели. По умолчанию используются следующие единицы измерения частоты: rad/TimeUnit, где TimeUnit - единица времени, указанная в TimeUnit собственность.
Создайте модель частотно-ответных данных SISO с частотными данными в ГГц.
load AnalyzerData; sys = frd(resp,freq,'FrequencyUnit','GHz');
Можно независимо указать единицы измерения частотных точек и времени выборки в FrequencyUnit и TimeUnit соответственно. Можно также указать единицы измерения частоты genfrd аналогичным образом.
Единицы измерения частоты отображаются на графиках частотной области. Для нескольких систем с различными частотными единицами используются единицы первой системы, если единицы измерения частоты в редакторе настроек панели инструментов равны auto.
Примечание
Изменение FrequencyUnit свойство изменяет поведение системы. Если необходимо использовать различные единицы измерения частоты без изменения поведения системы, используйте chgFreqUnit.
В этом примере показано, как извлечь подсистемы модели MIMO с помощью индексирования MATLAB ® и использования имен каналов .
Извлечение подсистем полезно, например, при необходимости анализа части сложной системы.
Создайте функцию передачи MIMO.
G1 = tf(3,[1 10]); G2 = tf([1 2],[1 0]); G = [G1,G2];
Извлечь подсистему из G от первого входа до всех выходов.
Gsub = G(:,1);
Эта команда использует индексирование MATLAB для указания подсистемы как G(out,in), где out задает выходные индексы и in задает входные индексы.
Используя имена каналов, можно использовать индексирование MATLAB для извлечения всей динамики, относящейся к определенному каналу. Используя этот подход, можно избежать необходимости отслеживать порядок каналов в сложной модели MIMO.
Назначьте имена входам модели.
G.InputName = {'temperature';'pressure'};
Поскольку G имеет два входа, используйте массив ячеек для указания двух имен каналов.
Извлечь подсистему из G который содержит всю динамику из 'temperature' вход на все выходы.
Gt = G(:,'temperature');
Gt является той же самой подсистемой, что и Gsub.
Примечание
При извлечении подсистемы из пространства состояния (ss) модель, результирующая модель пространства состояния может быть не минимальной. Использовать sminreal для устранения ненужных состояний в подсистеме.
В этом примере показано, как указать группы входных и выходных каналов в объекте модели и извлечь подсистемы с помощью групп.
Входные и выходные группы полезны для отслеживания входных и выходных данных в сложных моделях MIMO.
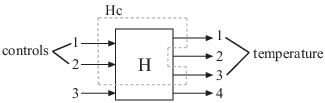
Создайте модель пространства состояния с тремя входами и четырьмя выходами.
H = rss(3,4,3);
Сгруппируйте входные данные следующим образом:
Входы 1 и 2 в группе с именем controls
Вывод 1 и 3 в группу с именем temperature
Вывод 1, 3 и 4 в группу с именем measurements
H.InputGroup.controls = [1 2]; H.OutputGroup.temperature = [1 3]; H.OutputGroup.measurements = [1 3 4];
InputGroup и OutputGroup являются структурами. Имя каждого поля в структуре является именем входной или выходной группы. Значение каждого поля представляет собой вектор, идентифицирующий каналы в этой группе.
Извлеките подсистему, соответствующую controls входные данные и temperature выходы.
Для индексирования в подсистемы можно использовать имена групп.
Hc = H('temperature','controls')Hc является двумя входами, двумя выходами ss модель, содержащая каналы ввода-вывода из 'controls' входные данные для 'temperature' выходы.
Вы можете увидеть отношения между H и подсистему Hc на этом рисунке.