В этом примере показано, как настроить модель системы управления Simulink ® на соответствие заданной полосе пропускания и заданным пределам стабильности в настройщике системы управления без явного создания целей настройки, учитывающих эти требования. Аналогичный подход можно использовать для быстрой настройки системы управления, смоделированной в MATLAB ®.
В этом примере показано, как функция «Быстрая настройка цикла» тюнера системы управления генерирует цели настройки на основе параметров частоты и коэффициента усиления и запаса по фазе. Этот параметр позволяет быстро настроить циклы обратной связи SISO или MIMO для настройки с использованием метода формирования циклов. В примере также показано, как добавить дополнительные требования к настройке в систему управления после использования опции «Быстрая настройка цикла».
Быстрая настройка цикла - это эквивалент тюнера системы управления looptune команда.
Откройте модель Simulink.
open_system('rct_distillation')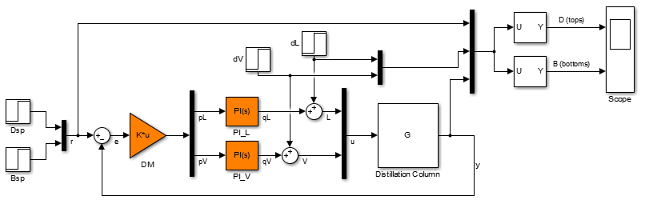
Эта модель представляет собой дистилляционную колонну, собранную на установке с двумя входами и двумя выходами. G. Перестраиваемые элементы являются матрицей усиления развязки DMи два контроллера PI, PI_L и PI_V. (Дополнительные сведения об этой модели см. в разделе Контроллер разъединения для дистилляционной колонны.)
Предположим, что цель состоит в настройке цикла обратной связи MIMO между r и y к полосе пропускания от 0,1 до 0,5 рад/с. Предположим, что также требуется запас усиления 7 дБ и запас фазы 45 градусов. Для быстрой настройки настройки системы управления для этих целей можно использовать параметр «Быстрая настройка цикла».
Открыть тюнер системы управления. В окне Simulink model в галерее Apps щелкните Control System Tuner.
Укажите блоки, которые требуется настроить. На вкладке «Настройка» окна «Настройка системы управления» нажмите кнопку «Выбрать![]() блоки». В диалоговом окне «Выбор настроенных блоков» нажмите кнопку «Добавить блоки». Затем выберите
блоки». В диалоговом окне «Выбор настроенных блоков» нажмите кнопку «Добавить блоки». Затем выберите DM, PI_L, и PI_V для настройки. (Дополнительные сведения о выборе настроенных блоков см. в разделе Настройка блоков в настройщике системы управления.)
Теперь модель готова к настройке на целевую полосу пропускания и пределы стабильности.
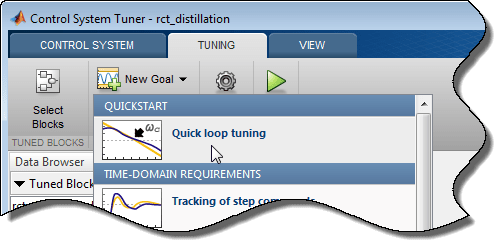
На вкладке Настройка выберите Новая цель > Быстрая настройка цикла.
Для быстрой настройки контура необходимо идентифицировать сигналы исполнительного механизма и сигналы датчиков, которые отделяют часть системы управления установки от контроллера, который для целей быстрой настройки контура является остальной частью системы управления. Сигналы привода - это выходы контроллера, которые управляют установкой, или входы установки. Сигналы датчиков представляют собой измерения выходного сигнала установки, который подается обратно в контроллер. В этой системе управления сигналы исполнительного механизма представлены векторным сигналом. uи сигналы датчика векторным сигналом y.
В диалоговом окне Quick Loop Tuning под Определяет сигналы привода (средства управления), добавляет сигнал привода, u. Точно так же под Определяет сигналы датчика (измерения), добавляет сигнал датчика, y (Дополнительные сведения об указании сигналов для настройки см. в разделе Указание целей для интерактивной настройки.)
В разделе Желаемые цели в поле Область пересечения целевого коэффициента усиления введите целевой диапазон полосы пропускания. [0.1 0.5]. Введите требуемый запас усиления и запас фазы в соответствующие поля.
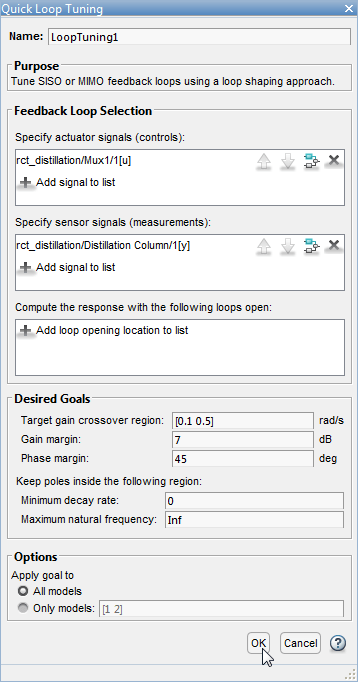
Нажмите кнопку OK. Control System Tuner автоматически генерирует цели настройки, которые фиксируют нужные цели, введенные в диалоговом окне.
В этом примере тюнер системы управления создает цель формы цикла и цель полей. Если бы вы изменили настройки положения полюса в диалоговом окне Быстрая настройка цикла (Quick Loop Tuning), была бы также создана цель полюсов.
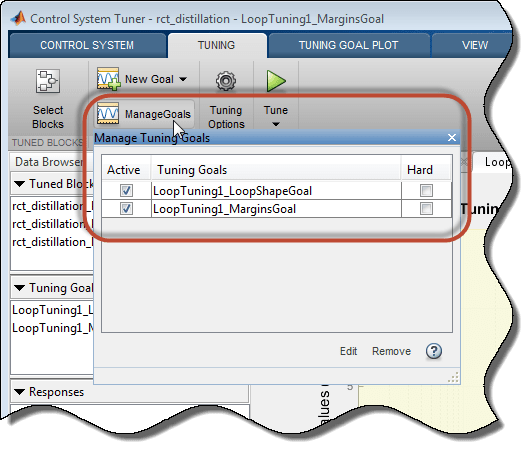
Щелкните![]() Управление целями (Manage Goals), чтобы проверить автоматически созданные цели. По умолчанию цели активны и обозначены как цели мягкой настройки.
Управление целями (Manage Goals), чтобы проверить автоматически созданные цели. По умолчанию цели активны и обозначены как цели мягкой настройки.
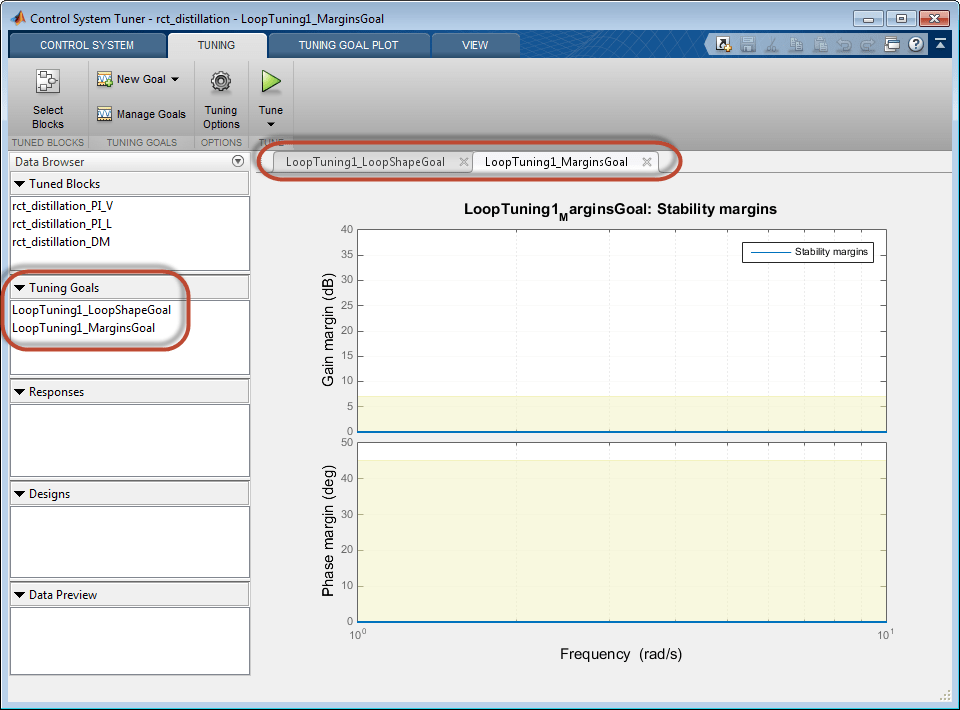
Можно дважды щелкнуть цели настройки, чтобы проверить их параметры, которые автоматически вычисляются и заполняются. Можно также изучить графические представления целей настройки. На вкладке «Настройка» просмотрите график LoopTuning1_LoopShapeGoal.
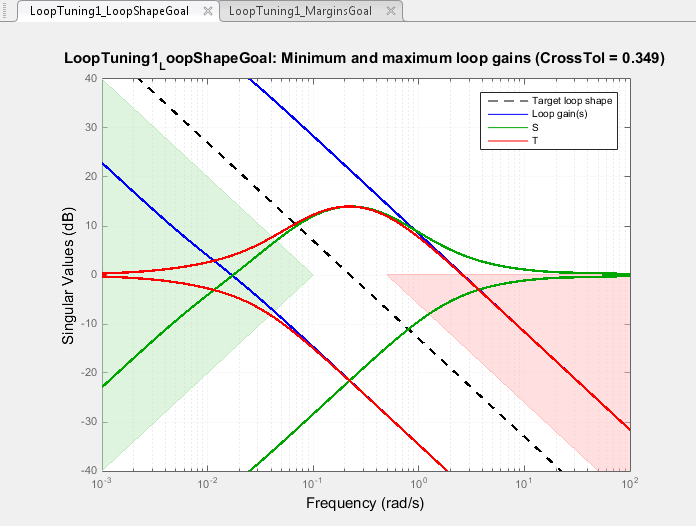
Целевой диапазон пересечения выражается как цель Loop Shape с профилем усиления с разомкнутым контуром интегратора. Закрашенные области графика показывают, что разрешенный диапазон пересечения равен [0.1 0.5] rad/s, как указано в диалоговом окне «Быстрая настройка цикла».
Аналогично, ваши маржинальные требования фиксируются на LoopTuning1_MarginsGoal участке.
Щелкните![]() Настроить (Tune), чтобы настроить модель в соответствии с автоматически созданными целями настройки. На графиках цели настройки можно увидеть, что требования удовлетворены.
Настроить (Tune), чтобы настроить модель в соответствии с автоматически созданными целями настройки. На графиках цели настройки можно увидеть, что требования удовлетворены.
Дополнительные графики для проверки других ответов системы см. в разделе Создание графиков ответов в настройщике системы управления.
Если требуется изменить требования к конструкции после использования функции «Быстрая настройка цикла», можно отредактировать автоматически созданные цели настройки и снова настроить модель. Можно также создать дополнительные цели настройки.
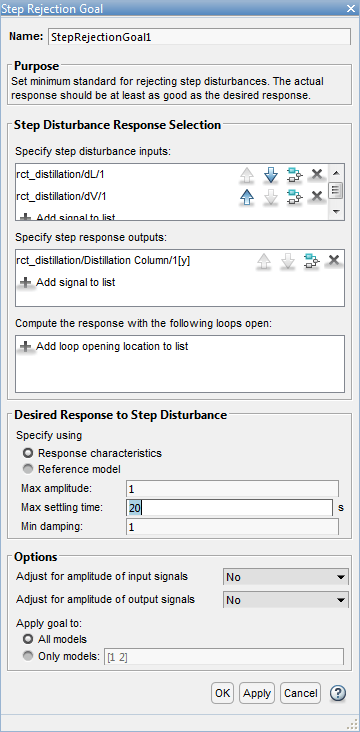
Например, добавьте требование, ограничивающее реакцию на нарушение, применяемое на заводских вводах. Ограничить ответ на команду step в dL и dV на выходах, y, хорошо демпфируется, оседает менее чем за 20 секунд и не превышает 4 по амплитуде. Выберите Новая цель > Отклонение нарушений шага и введите соответствующие значения в диалоговом окне Цель отклонения шага. (Дополнительные сведения о создании целей настройки см. в разделе Указание целей для интерактивной настройки.)
Теперь модель можно перенастроить для достижения всех этих целей настройки.
looptune (for slTuner)(Проект управления Simulink)
