Определите, как система с замкнутым контуром реагирует на определенный входной сигнал при использовании тюнера системы управления. Используйте ссылочную модель, чтобы указать требуемый переходный отклик.
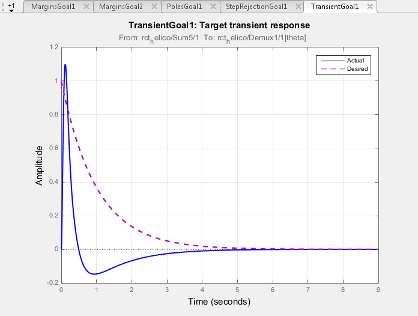
Цель переходного процесса (Transient Goal) ограничивает отклик переходного процесса из указанных местоположений ввода в указанные расположения вывода. Это требование указывает, что отклик переходного процесса близко соответствует отклику ссылочной модели. Ограничение выполняется, если относительная разница между настроенными и целевыми откликами находится в пределах заданного допуска.
Можно ограничить отклик импульсным, пошаговым или наклонным входным сигналом. Можно также ограничить отклик на входной сигнал, который задается импульсной характеристикой входного фильтра.
На вкладке «Настройка» окна «Настройка системы управления» выберите «Новая цель» > «Сопоставление переходных ответов» для создания временной цели.
При настройке систем управления в командной строке используйте TuningGoal.Transient для указания цели ответа на шаг.
Этот раздел диалогового окна используется для задания точек ввода, вывода и открытия цикла для оценки цели настройки.
Укажите входные данные ответа
Выберите одно или несколько расположений сигнала в модели, в которых следует применить входной сигнал. Чтобы ограничить отклик SISO, выберите однозначный входной сигнал. Например, чтобы ограничить отклик переходного процесса из расположения с именем 'u' в расположение с именем 'y', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'u'. Чтобы ограничить MIMO-отклик, выберите несколько сигналов или сигнал с векторным значением.
Укажите выходные данные ответа
Выберите одно или несколько расположений сигнала в модели, в которых будет измеряться реакция переходного процесса. Чтобы ограничить отклик SISO, выберите выходной сигнал с одним значением. Например, чтобы ограничить отклик переходного процесса из расположения с именем 'u' в расположение с именем 'y', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'y'. Чтобы ограничить MIMO-отклик, выберите несколько сигналов или сигнал с векторным значением. Для систем MIMO количество выходов должно равняться количеству входов.
Вычислить ответ, открыв следующие циклы
Выберите одно или несколько расположений сигналов в модели, в которых следует открыть цикл обратной связи для оценки этой цели настройки. Цель настройки оценивается по конфигурации с разомкнутым контуром, созданной путем открытия контуров обратной связи в определенных местоположениях. Например, чтобы оценить цель настройки с помощью проема в месте с именем 'x', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'x'.
Совет
Чтобы выделить любой выбранный сигнал в модели Simulink ®, щелкните значок![]() . Чтобы удалить сигнал из списка ввода или вывода, щелкните значок.
. Чтобы удалить сигнал из списка ввода или вывода, щелкните значок. ![]() После выбора нескольких сигналов их можно переупорядочить с помощью
После выбора нескольких сигналов их можно переупорядочить с помощью![]() и.
и. ![]() Дополнительные сведения о том, как указать расположение сигнала для цели настройки, см. в разделе Указание целей для интерактивной настройки.
Дополнительные сведения о том, как указать расположение сигнала для цели настройки, см. в разделе Указание целей для интерактивной настройки.
Выберите форму входного сигнала для переходного отклика, который требуется ограничить, в настройщике системы управления.
Impulse - Ограничить отклик единичным импульсом.
Step - Ограничить отклик единичным шагом. Используя Step эквивалентно использованию цели отслеживания шагов.
Ramp - Ограничить отклик на наклонную проекцию установки, u = t.
Other - Ограничение отклика на пользовательский входной сигнал. Укажите пользовательский входной сигнал, введя передаточную функцию (tf или zpkмодель) в поле Использовать импульсную характеристику фильтра. Пользовательский входной сигнал является откликом этой передаточной функции на единичный импульс.
Эта передаточная функция представляет преобразование Лапласа требуемого пользовательского входного сигнала. Например, чтобы ограничить переходный отклик на единично-амплитудную синусоидальную волну частоты w, введите tf(w,[1,0,w^2]). Эта передаточная функция является преобразованием Лапласа sin (wt ).
Введенная передаточная функция должна быть непрерывной и не должна иметь полюсов в открытой правой половине плоскости. Последовательное соединение этой передаточной функции с эталонной системой для требуемого переходного отклика не должно иметь условия прохождения.
Укажите систему привязки для требуемого переходного отклика в качестве динамической модели системы, например tf, zpk, или ss модель. Переходная цель (Transient Goal) ограничивает отклик системы, чтобы точно соответствовать отклику этой системы на входной сигнал, указанный в поле Выбор начального сигнала (Initial Signal Selection).
Введите имя ссылочной модели в рабочей области MATLAB ® в поле Ссылочная модель (Reference Model). Либо введите команду для создания подходящей ссылочной модели, например: tf(1,[1 1.414 1]). Ссылочная модель должна быть стабильной, а последовательное соединение ссылочной модели с входным формирующим фильтром не должно иметь условия прохождения.
Используйте этот раздел диалогового окна, чтобы указать дополнительные характеристики цели переходного отклика.
Сохранить несоответствие% ниже
Укажите относительную ошибку сопоставления между фактическим (настроенным) переходным ответом и целевым ответом. Увеличьте это значение, чтобы ослабить соответствующий допуск. Относительная ошибка соответствия, erel, определяется как:
) (t) ‖ 2.
y (t) - yref (t) - несоответствие ответа, и 1 - yref (TR) (t) - переходная часть yref (отклонение от установившейся стоимости или ⋅ ‖2 обозначает энергию сигнала (с 2 нормами). Зазор можно понимать как отношение среднеквадратичного (среднеквадратичного) рассогласования к среднеквадратичному значению опорного переходного процесса.
Регулировка амплитуды входных сигналов и регулировка амплитуды выходных сигналов
Для цели настройки MIMO, когда выбор единиц приводит к смешению малых и больших сигналов в разных каналах отклика, эта опция позволяет задать относительную амплитуду каждой записи в векторнозначных сигналах. Эта информация используется для масштабирования внедиагональных членов в передаточной функции от целевых входов настройки к выходам. Такое масштабирование обеспечивает измерение кросс-соединений относительно амплитуды каждого опорного сигнала.
Если для этих параметров задано значение No, ограниченная функция передачи с обратной связью не масштабируется для относительных амплитуд сигнала. Когда выбор единиц приводит к смешиванию малых и больших сигналов, использование немасштабированной передаточной функции может привести к плохим результатам настройки. Задайте для опции значение Yes для обеспечения относительных амплитуд входных сигналов и выходных сигналов вашей передаточной функции.
Например, предположим, что цель настройки ограничивает передаточную функцию с 2 входами и 2 выходами. Предположим далее, что второй входной сигнал для передаточной функции имеет тенденцию быть примерно в 100 раз больше, чем первый сигнал. В этом случае выберите Yes и введите [1,100] в текстовом поле Амплитуды входных сигналов.
Регулировка амплитуды сигнала вызывает оценку цели настройки на масштабированной передаточной функции Do-1T (s) Di, где T (s) является немасштабированной передаточной функцией. Do и Di - диагональные матрицы с амплитудами выходных сигналов и амплитудами значений входных сигналов на диагонали соответственно.
Значение по умолчанию, No, означает, что масштабирование не применяется.
Применить цель к
Эта опция используется при настройке сразу нескольких моделей, например массива моделей, полученных линеаризацией модели Simulink в различных рабочих точках или значениями параметров блока. По умолчанию активные цели настройки применяются для всех моделей. Чтобы применить требование настройки для подмножества моделей в массиве, выберите Только модели (Only Models). Затем введите индексы массива моделей, для которых применяется цель. Например, предположим, что необходимо применить цель настройки ко второй, третьей и четвертой моделям в массиве модели. Для ограничения применения требования введите 2:4 в текстовом поле «Только модели».
Дополнительные сведения о настройке для нескольких моделей см. в разделе Подходы к надежной настройке (инструментарий надежного управления).
При использовании этого требования для настройки системы управления модуль настройки системы управления пытается принудительно использовать нулевой проход (D = 0) для передачи, ограничиваемой требованием. Нулевой проход накладывается потому, что H2 норма и, следовательно, значение цели настройки (см. Алгоритмы) бесконечны для систем непрерывного времени с ненулевым проходом.
Тюнер системы управления обеспечивает нулевое прохождение, фиксируя в нуле все настраиваемые параметры, которые вносят вклад в прохождение. Тюнер системы управления возвращает ошибку, если исправления этих настраиваемых параметров недостаточно для обеспечения нулевого прохождения. В таких случаях необходимо изменить требование или структуру управления или вручную зафиксировать некоторые настраиваемые параметры системы в значениях, которые устраняют условие прохождения.
Когда ограниченная передаточная функция имеет несколько настраиваемых блоков последовательно, подход программного обеспечения к обнулению всех параметров, которые вносят вклад в общее прохождение, может быть консервативным. В этом случае достаточно обнулить срок прохождения одного из блоков. Если требуется определить, какой блок имеет канал, зафиксированный на нуле, можно вручную зафиксировать канал настроенного блока по своему выбору.
Сведения о приведении параметров настраиваемых блоков к заданным значениям см. в разделе Просмотр и изменение параметров блоков в настройщике системы управления.
Эта цель настройки также накладывает неявное ограничение стабильности на функцию передачи с замкнутым контуром между указанными входами и выходами, вычисляемое с помощью циклов, открытых в указанных местоположениях открытия контура. Динамика, на которую влияет это неявное ограничение, является стабилизированной динамикой для этой цели настройки. Опции Минимальная скорость затухания (Minimum decay rate) и Максимальная собственная настройка частоты (Maximum natural frequency) управляют нижней и верхней границами этой неявно ограниченной динамики. Если оптимизация не соответствует границам по умолчанию или если границы по умолчанию противоречат другим требованиям, на вкладке Настройка (Tuning) воспользуйтесь опциями настройки для изменения значений по умолчанию.
При настройке системы управления программа преобразует каждую цель настройки в нормализованное скалярное значение f (x). Здесь x - вектор свободных (настраиваемых) параметров в системе управления. Затем программа корректирует значения параметров для минимизации f (x) или для приведения f (x) ниже 1, если требование настройки является жестким ограничением.
Для переходной цели f (x) основан на относительном разрыве между настроенным ответом и целевым ответом:
) (t) ‖ 2.
y (t) - yref (t) - несоответствие ответа, и 1 - yref (TR) (t) - переходная часть yref (отклонение от установившейся стоимости или ⋅ ‖2 обозначает энергию сигнала (с 2 нормами). Зазор можно понимать как отношение среднеквадратичного (среднеквадратичного) рассогласования к среднеквадратичному значению опорного переходного процесса.
