Печать данных слоя HD Live Map Here
plot( строит графики данных уровня HERE HD Live Map [1] (HERE HDLM) на географических осях .layerData)layerData - объект слоя карты, считанный из выбранных фрагментов hereHDLMReader с помощью read функция.
Загрузите последовательность координат широты и долготы из маршрута движения.
data = load('geoSequence.mat')data = struct with fields:
latitude: [1000×1 double]
longitude: [1000×1 double]
Создайте считывающее устройство HERE HD Live Map (HERE HDLM) из указанных координат. Если ранее не были настроены учетные данные HERE HDLM, появится диалоговое окно с предложением ввести их. Считыватель содержит данные многоуровневой карты для плитки, на которой находится маршрут движения.
reader = hereHDLMReader(data.latitude,data.longitude);
Считывание данных топологии дороги из TopologyGeometry слой. Постройте график данных.
roadTopology = read(reader,'TopologyGeometry'); plot(roadTopology) legend('Location','northeastoutside')

Наложение координат ведущей трассы на график.
hold on geoplot(data.latitude,data.longitude,'bo-','DisplayName','Route') hold off

Увеличьте изображение трассы.
latcenter = median(data.latitude); loncenter = median(data.longitude); offset = 0.005; latlim = [latcenter-offset,latcenter+offset]; lonlim = [loncenter-offset,loncenter+offset]; geolimits(latlim,lonlim)

Используйте услугу HERE HD Live Map (HERE HDLM) для считывания данных топологии полосы движения маршрута движения и окружающей его зоны. Постройте график этих данных, а затем выполните потоковую передачу маршрута на географическом проигрывателе.
Загрузите координаты широты и долготы маршрута движения в Натике, штат Массачусетс, США.
route = load('geoSequenceNatickMA.mat');
lat = route.latitude;
lon = route.longitude;Потоковая передача координат на географическом проигрывателе.
player = geoplayer(lat(1),lon(1),'HistoryDepth',5); plotRoute(player,lat,lon) for idx = 1:length(lat) plotPosition(player,lat(idx),lon(idx)) end

Создайте устройство чтения HERE HDLM из координат маршрута. Если ранее не были настроены учетные данные HERE HDLM, появится диалоговое окно с предложением ввести их. Считыватель содержит данные карты для двух фрагментов карты, пересекаемых маршрутом.
reader = hereHDLMReader(lat,lon);
Считывание данных топологии полосы движения из LaneTopology слой плиток карты. Постройте график топологии полос движения.
laneTopology = read(reader,'LaneTopology');
plot(laneTopology)
Наложение данных трассы на график.
hold on geoplot(lat,lon,'bo-','DisplayName','Route'); hold off

Наложение данных топологии полосы на географический игрок. Снова потоковая передача маршрута.
plot(laneTopology,'Axes',player.Axes) for idx = 1:length(lat) plotPosition(player,lat(idx),lon(idx)) end

Используйте веб-сервис HERE HD Live Map (HERE HDLM) для чтения данных геометрии полосы 3-D из плитки карты. Затем постройте график данных на базовой карте OpenStreetMap ®.
Создайте устройство чтения HERE HDLM для идентификатора плитки карты, представляющей область Берлина, Германия. Если ранее не были настроены учетные данные HERE HDLM, появится диалоговое окно с предложением ввести их.
tileID = uint32(377894435); reader = hereHDLMReader(tileID);
Добавьте базовую карту OpenStreetMap в список базовых карт, доступных для использования с услугой HERE HDLM. После добавления базовой карты нет необходимости добавлять ее снова в будущих сессиях.
name = 'openstreetmap'; url = 'https://a.tile.openstreetmap.org/${z}/${x}/${y}.png'; copyright = char(uint8(169)); attribution = copyright + "OpenStreetMap contributors"; addCustomBasemap(name,url,'Attribution',attribution)
Считывание данных 3-D геометрии полосы движения из LaneGeometryPolyline слой плитки карты. Постройте график геометрии полосы движения на вкладке openstreetmap базовая карта.
laneGeometryPolyline = read(reader,'LaneGeometryPolyline'); gx = plot(laneGeometryPolyline); geobasemap(gx,'openstreetmap')

Увеличьте изображение центральной координаты плитки карты.
latcenter = laneGeometryPolyline.TileCenterHere3dCoordinate.Here2dCoordinate(1); loncenter = laneGeometryPolyline.TileCenterHere3dCoordinate.Here2dCoordinate(2); offset = 0.001; latlim = [latcenter-offset,latcenter+offset]; lonlim = [loncenter-offset,loncenter+offset]; geolimits(latlim,lonlim)

layerData - ЗДЕСЬ данные уровня HDLMLaneGeometryPolyline объект | LaneTopology объект | TopologyGeometry объектЗДЕСЬ данные слоя HDLM для печати, указанные как один из объектов слоя, показанных в таблице.
| Объект-слой | Описание | Образец графика |
|---|---|---|
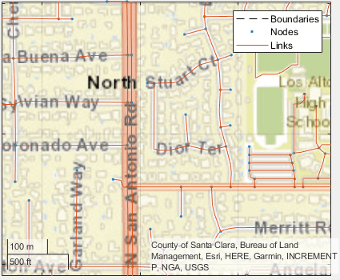
LaneGeometryPolyline | 3-D геометрию полосы движения, состоящую из набора 3-D точек, соединенных в полилинии. |
|
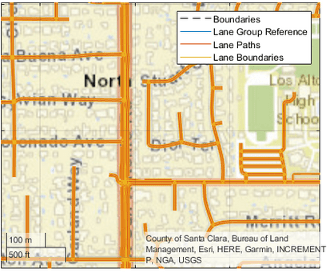
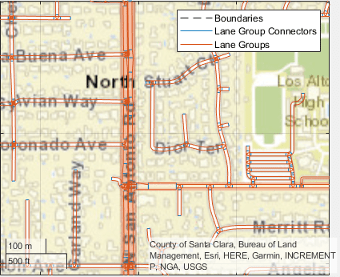
LaneTopology | Топологии модели HD Lane, включая группы полос, соединители групп полос, полосы и соединители полос. Этот слой также содержит упрощенную 2-D граничную геометрию модели полосы движения для определения сродства и переполнения плитки карты. |
|
TopologyGeometry | Топология и геометрия 2-D линии дороги. Этот слой также содержит определения связей (улиц) и узлов (пересечений и тупиков) в плитке карты. |
|
Чтобы получить эти слои из плиток карты, выбранных hereHDLMReader объект, используйте read функция.
gxIn - Географические оси для построения графика данныхGeographicAxes объектГеографические оси для печати данных, указанные как GeographicAxes объект. [2
]
geoaxes | geobasemap | geoplayer | geoplot | hereHDLMReader | read
[1] Необходимо заключить отдельное соглашение с HERE, чтобы получить доступ к услугам HDLM и получить необходимые учетные данные (access_key_id и access_key_secret) для использования услуги HERE.
[2] Выравнивание границ и меток областей является представлением функции, предоставляемой поставщиками данных, и не подразумевает одобрения MathWorks ®.