Экспорт сценария управления в файл OpenDRIVE или ASAM OpenSCRIPTION
export( экспортирует дороги, полосы движения, развязки и актеров в сценарии вождения в формат файла OpenDRIVE ® 1.4H, описывая статическое содержание сценария вождения. Между исходным сценарием и экспортируемым сценарием могут быть различия. Дополнительные сведения см. в разделе Ограничения.scenario,'OpenDRIVE',filename)
export( экспортирует дорожную сеть, субъектов и траектории в сценарии вождения в формат файла ASAM OpenSCRIPTION ® 1.0, описывая динамическое содержание сценария вождения. При экспорте в файл ASAM OpenSCRIPTION также экспортируется несколько файлов данных. Дополнительные сведения см. в разделе Файлы данных, экспортированные с помощью файла ASAM OpenSCRIPTION.scenario,'OpenSCENARIO',filename)
Создайте сценарий управления.
inputScenario = drivingScenario;
Импортируйте дорожную сеть OpenStreetMap в сценарий вождения. Для получения дополнительной информации о файле osm см. [1].
fileName = 'chicago.osm'; roadNetwork(inputScenario,'OpenStreetMap',fileName);
Экспорт в файл OpenDRIVE.
fileName = 'chicago.xodr'; export(inputScenario,'OpenDRIVE',fileName);
Warning: There may be minor variation between the actual driving scenario and the exported OpenDRIVE road networks. For more information, see <a href="matlab:helpview(fullfile(docroot,'toolbox','driving','helptargets.map'),'exportOpenDriveCLI')">export</a>.
Прочтите экспортированный файл OpenDRIVE с помощью roadNetwork функция.
scenario = drivingScenario;
roadNetwork(scenario,'OpenDRIVE',fileName);Постройте график экспортированного сценария. Обратите внимание, что отображение экспортируемой дорожной сети разворачивается вдоль размеров x и y и не имеет линий границы.
figure
plot(inputScenario)
zoom(2);
title('Actual Scenario')
figure
plot(scenario)
zoom(2);
title('Exported Scenario')
Приложение
[1] OSM-файл загружается из https://www.openstreetmap.org, что обеспечивает доступ к данным карты, полученным от толпы, по всему миру. Данные лицензированы по лицензии Open Data Commons Open Database License (ODbL), https://opendatacommons.org/licenses/odbl/.
Создайте сценарий движения с одной дорогой, имеющей S-образную кривую.
scenario = drivingScenario; roadcenters = [-35 20 0; -20 -20 0; 0 0 0; 20 20 0; 35 -20 0];
Создайте полосы движения и добавьте их к дороге.
lm = [laneMarking('Solid','Color','w') ... laneMarking('Dashed','Color','y') ... laneMarking('Dashed','Color','y') ... laneMarking('Solid','Color','w')]; ls = lanespec(3,'Marking',lm); road(scenario,roadcenters,'Lanes',ls);
Постройте график сценария.
plot(scenario)

Экспортируйте дорожную сеть в сценарии в файл OpenDRIVE.
fileName = 'scurveroad.xodr'; export(scenario,'OpenDRIVE',fileName)
Warning: There may be minor variation between the actual driving scenario and the exported OpenDRIVE road networks. For more information, see <a href="matlab:helpview(fullfile(docroot,'toolbox','driving','helptargets.map'),'exportOpenDriveCLI')">export</a>.
Файл OpenDRIVE можно импортировать в рабочую область MATLAB с помощью roadNetwork функция.
scenario = drivingScenario;
roadNetwork(scenario,'OpenDRIVE',fileName)
plot(scenario)
Создайте сценарий управления.
scenario = drivingScenario('StopTime',6);Импортируйте дорожную сеть из файла OpenDRIVE в сценарий.
fileName = 'parking.xodr'; roadNetwork(scenario,'OpenDRIVE',fileName);
Добавьте ego-транспортное средство к сценарию. Задайте траекторию движения транспортного средства по кривой с изменяющейся скоростью.
egoVehicle = vehicle(scenario,'ClassID',1);
waypoints = [-80 43; -34 29; -18 15; -10 -2; 4 -17; 38 -24; 52 -20];
speed = [50 20 20 20 20 50 50];
trajectory(egoVehicle,waypoints,speed);Добавьте актера, не являющегося эго, и задайте для него значение «породить» во время моделирования, указав значение времени ввода. Создайте траекторию для элемента, не являющегося эго.
truck = vehicle(scenario,'ClassID',2,'Position',[4 -17 0],'EntryTime',3); waypoints = [4 -17; 20 -24; 38 -24; 60 -16]; speed = [40 40 40 40]; trajectory(truck,waypoints,speed);
Постройте график сценария и выполните моделирование. Наблюдайте, как транспортное средство замедляется при движении по кривой.
plot(scenario,'Waypoints','on'); while advance(scenario) pause(0.01) end

Экспортируйте сценарий в файл ASAM OpenSCRIPTION.
export(scenario,'OpenSCENARIO','parking.xosc');
Warning: Exported road network to OpenDRIVE may have minor variations than actual road network in the scenario. For more information, see <a href="matlab:helpview(fullfile(docroot,'toolbox','driving','helptargets.map'),'exportOpenDriveCLI')">export</a>.
Ограничения экспорта OpenDRIVE
Дороги
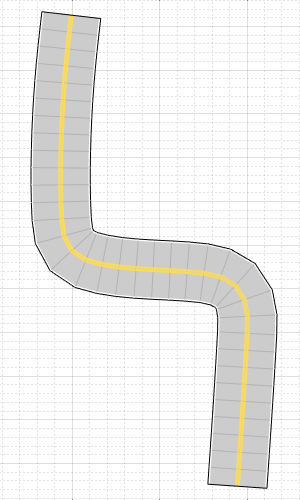
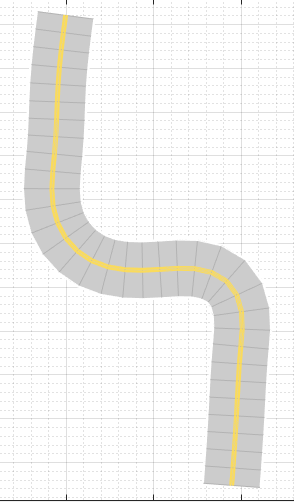
Кубический многочлен и параметрические типы геометрии кубического многочлена в сценарии экспортируются как типы геометрии переходной кривой. Это приводит к некоторым изменениям в геометрии экспортируемой дороги, если дорога представляет собой криволинейную дорогу. Например, на рисунке ниже обратите внимание, что острые углы на входной дороге становятся относительно гладкими при экспорте в формат OpenDRIVE.
| Входная дорога | Экспортированная дорога OpenDRIVE |
|
|
|
Когда сегменты соседних дорог перекрываются друг с другом, функция не экспортирует перекрывающиеся сегменты дорог.
| Входные дороги | Экспортированные дороги OpenDRIVE |
|
|
|
Переулки
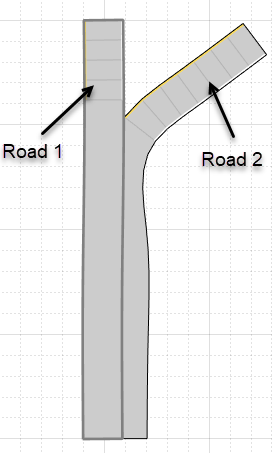
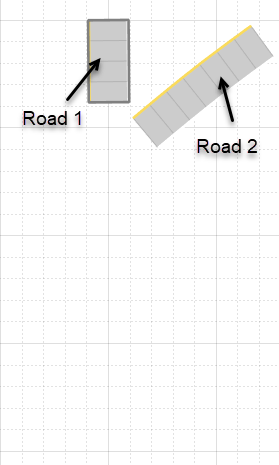
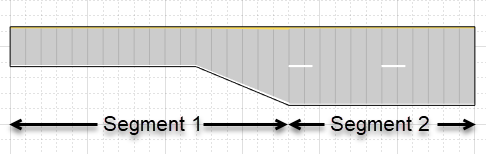
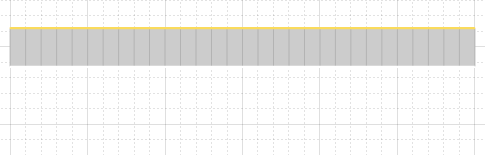
Если дорога со спецификациями нескольких полос имеет любой сегмент, содержащий только одну полосу, функция не экспортирует спецификации нескольких полос. Вместо этого спецификации первого сегмента дороги применяются ко всей дороге во время экспорта.
| Входная дорога | Экспортированная дорога OpenDRIVE |
Первый отрезок оригинальной дороги имеет только одну полосу.
| Вся экспортируемая дорога имеет ту же спецификацию, что и первый сегмент входной дороги.
|
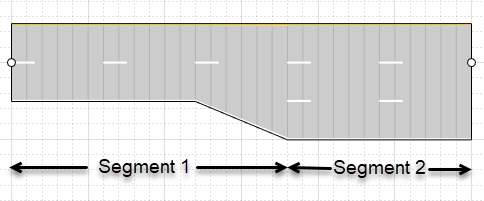
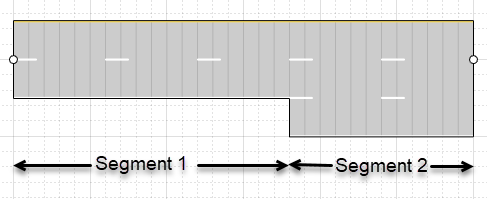
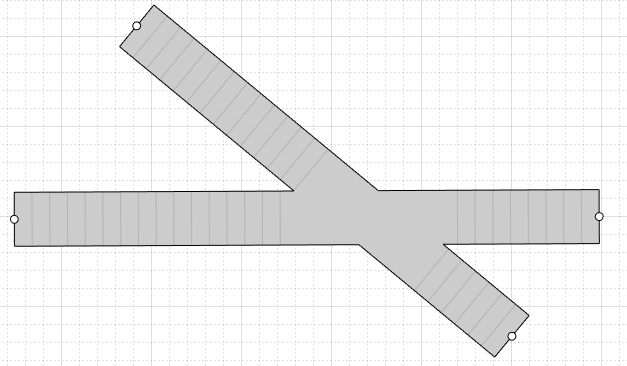
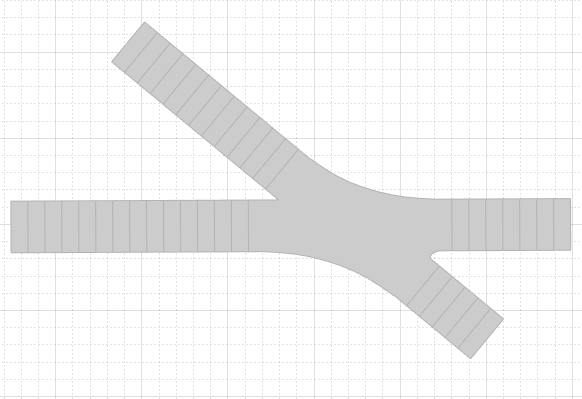
Если дорога с несколькими спецификациями полос содержит конусность между двумя сегментами дороги, функция экспортирует дорогу без конусности.
| Входная дорога | Экспортированная дорога OpenDRIVE |
|
|
|
Когда дорога, состоящая из нескольких сегментов, соединена с развязкой, функция не экспортирует дорогу.
Соединения
Соединения дорожной сети обрабатываются без информации о соединении полос, поэтому формы соединений могут быть неточными в экспортируемом сценарии.
| Входная дорога | Экспортированная дорога OpenDRIVE |
|
|
|
Актеры
export функция не экспортирует каких-либо субъектов, присутствующих либо на развязке, либо на дороге с несколькими сегментами дороги.
При экспорте определяемого пользователем субъекта функция устанавливает тип объекта как 'none'.
Импорт OpenDRIVE
При экспорте объекта управляющего сценария, содержащего импортированный сценарий OpenDRIVE, ограничения импорта OpenDRIVE применяются к экспорту OpenDRIVE. Можно импортировать сценарий OpenDRIVE в drivingScenario с помощью roadNetwork функция. Сведения об ограничениях импорта OpenDRIVE см. в разделе roadNetwork.