Вычислить команду угла поворота для пути, следующего по методу Стэнли
steerCmd = lateralControllerStanley(refPose,currPose,currVelocity)
Контроллер вычисляет команду угла поворота рулевого управления по методу Стэнли [1], закон управления которого основан на кинематической модели велосипеда. Этот контроллер используется для отслеживания пути в низкоскоростных средах, где инерционные эффекты минимальны.
steerCmd = lateralControllerStanley(refPose,currPose,currVelocity,Name,Value)lateralControllerStanley(refPose,currPose,currVelocity,'Direction',-1) вычисляет команду угла поворота рулевого управления для транспортного средства, находящегося в обратном движении.
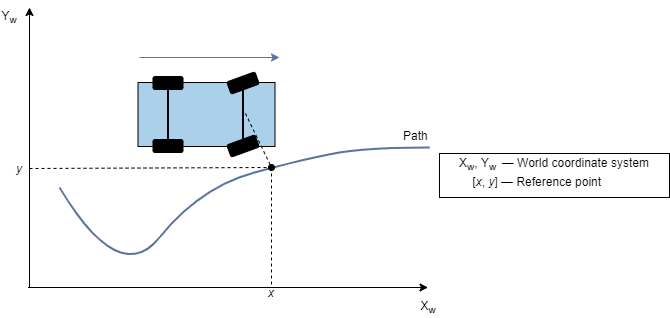
refPose - Эталонная позаОпорная поза, заданная как вектор [x, y, Start]. x и y имеют значения в метрах, а Start- в градусах.
x и y указывают опорную точку для направления транспортного средства в направлении. Λ задает угол ориентации траектории в этой опорной точке и является положительным в направлении против часовой стрелки.
Для транспортного средства, движущегося вперед, контрольной точкой является точка на траектории, ближайшая к центру передней оси транспортного средства.
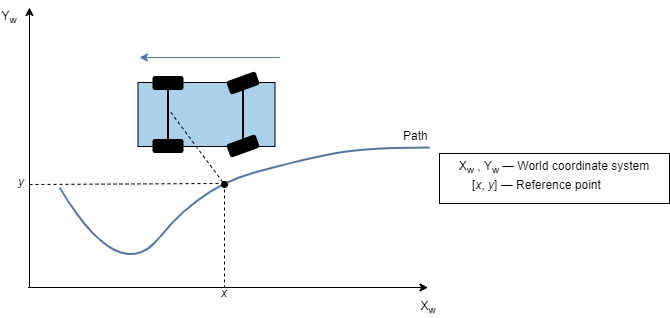
Для транспортного средства, движущегося задним ходом, контрольной точкой является точка на траектории, ближайшая к центру задней оси транспортного средства.
Типы данных: single | double
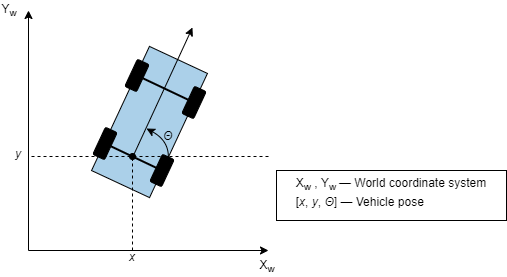
currPose - Текущая позаТекущая поза транспортного средства, указанная как вектор [x, y, Start]. x и y имеют значения в метрах, а Start- в градусах.
x и y указывают местоположение транспортного средства, которое определяется как центр задней оси транспортного средства.
Δ определяет угол ориентации транспортного средства в месте (x, y) и является положительным в направлении против часовой стрелки.
Дополнительные сведения о позе транспортного средства см. в разделе Системы координат в автоматизированной панели инструментов вождения.
Типы данных: single | double
currVelocity - Текущая продольная скоростьТекущая продольная скорость транспортного средства, определяемая как реальный скаляр. Единицы измерения в метрах в секунду.
Если транспортное средство движется вперед, то это значение должно быть больше 0.
Если транспортное средство движется в обратном направлении, то это значение должно быть меньше 0.
Значение 0 представляет транспортное средство, которое не находится в движении.
Типы данных: single | double
Укажите дополнительные пары, разделенные запятыми Name,Value аргументы. Name является именем аргумента и Value - соответствующее значение. Name должен отображаться внутри кавычек. Можно указать несколько аргументов пары имен и значений в любом порядке как Name1,Value1,...,NameN,ValueN.
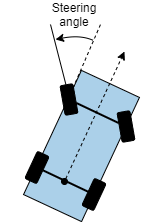
'MaxSteeringAngle',25steerCmd - Команда угла поворота рулевого управленияКоманда угла поворота, в градусах, возвращается как действительный скаляр. Это значение является положительным в направлении против часовой стрелки.
Дополнительные сведения см. в разделе Системы координат в автоматизированной панели инструментов вождения.
Для вычисления команды угла поворота контроллер минимизирует ошибку положения и ошибку угла текущего положения относительно опорного положения. Направление движения транспортного средства определяет эти значения ошибок.
При движении транспортного средства вперед ('Direction' пара имя-значение 1):
Погрешность положения - боковое расстояние от центра передней оси до опорной точки на траектории.
Погрешность угла - это угол переднего колеса относительно опорной траектории.
При движении транспортного средства в обратном направлении ('Direction' пара имя-значение -1):
Погрешность положения - боковое расстояние от центра задней оси до опорной точки на пути.
Погрешность угла представляет собой угол заднего колеса относительно исходной траектории.
Для получения подробной информации о том, как контроллер минимизирует эти ошибки, см. [1].
[1] Гофман, Габриэль М., Клэр Дж. Томлин, Майкл Монтемерло и Себастьян Трюн. «Отслеживание автономных автомобильных траекторий для внедорожного вождения: дизайн контроллера, экспериментальная валидация и гонки». Американская конференция по контролю. 2007, стр 2296–2301. doi:10.1109/ACC.2007.4282788
