Управление углом поворота транспортного средства для траектории следования по методу Стэнли
Автоматизированная панель инструментов вождения/управление транспортным средством
Блок Стэнли бокового контроллера вычисляет команду угла поворота в градусах, которая регулирует текущую позу транспортного средства для соответствия исходной позе, учитывая текущую скорость и направление транспортного средства. Контроллер вычисляет эту команду методом Стэнли [1], закон управления которого основан как на кинематической, так и на динамической модели велосипеда. Для переключения между моделями используйте параметр Модель транспортного средства (Vehicle model).
Кинематическая модель велосипеда подходит для пути следования в низкоскоростных условиях, таких как стоянки, где инерционные эффекты минимальны.
Динамическая модель велосипеда подходит для пути следования в высокоскоростных средах, таких как автомагистрали, где инерционные эффекты более выражены. Эта модель транспортного средства обеспечивает дополнительные параметры, описывающие динамику транспортного средства.
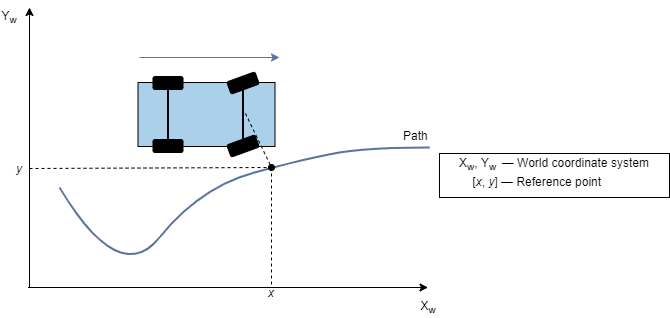
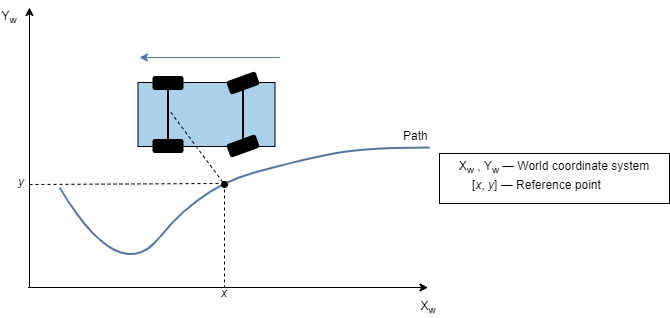
RefPose - Эталонная позаОпорная поза, заданная как вектор [x, y, Start]. x и y имеют значения в метрах, а Start- в градусах.
x и y указывают опорную точку для направления транспортного средства в направлении. Λ задает угол ориентации траектории в этой опорной точке и является положительным в направлении против часовой стрелки.
Для транспортного средства, движущегося вперед, контрольной точкой является точка на траектории, ближайшая к центру передней оси транспортного средства.
Для транспортного средства, движущегося задним ходом, контрольной точкой является точка на траектории, ближайшая к центру задней оси транспортного средства.
Типы данных: single | double
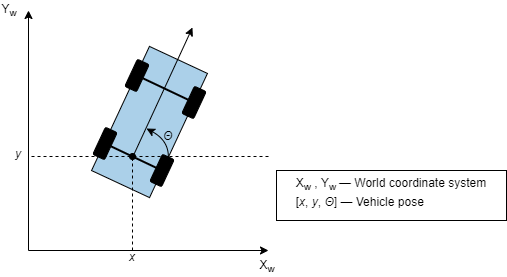
CurrPose - Текущая позаТекущая поза транспортного средства, указанная как вектор [x, y, Start]. x и y имеют значения в метрах, а Start- в градусах.
x и y указывают местоположение транспортного средства, которое определяется как центр задней оси транспортного средства.
Δ определяет угол ориентации транспортного средства в месте (x, y) и является положительным в направлении против часовой стрелки.
Дополнительные сведения о позе транспортного средства см. в разделе Системы координат в автоматизированной панели инструментов вождения.
Типы данных: single | double
CurrVelocity - Текущая продольная скоростьТекущая продольная скорость транспортного средства, определяемая как реальный скаляр. Единицы измерения в метрах в секунду.
Если транспортное средство движется вперед, то это значение должно быть больше 0.
Если транспортное средство движется в обратном направлении, то это значение должно быть меньше 0.
Значение 0 представляет транспортное средство, которое не находится в движении.
Типы данных: single | double
Direction - Направление движения транспортного средства1 (движение вперед) | -1 (обратное движение)Направление движения транспортного средства, указанное как 1 для движения вперед или -1 для обратного движения. Направление движения определяет ошибку положения и ошибку угла, используемые для вычисления команды угла поворота. Дополнительные сведения см. в разделе Алгоритмы.
Curvature - Кривизна траекторииКривизна траектории в опорной точке, в радианах на метр, заданная как действительный скаляр.
Для транспортного средства, движущегося вперед, контрольной точкой является точка на траектории, ближайшая к центру передней оси транспортного средства.
Для транспортного средства, движущегося задним ходом, контрольной точкой является точка на траектории, ближайшая к центру задней оси транспортного средства.
Кривизну траектории можно получить из выходного порта «Кривизны» блока «Сглаженный сплайн траектории». Кривизны границ полос также можно получить из структур границ выходных полос блока «Считыватель сценариев».
Чтобы включить этот порт, установите для модели транспортного средства значение Dynamic bicycle model.
CurrYawRate - Текущая скорость рысканияТекущая скорость рыскания транспортного средства, в градусах в секунду, заданная как действительный скаляр. Текущая скорость рыскания - это скорость изменения угловой скорости транспортного средства.
Чтобы включить этот порт, установите для модели транспортного средства значение Dynamic bicycle model.
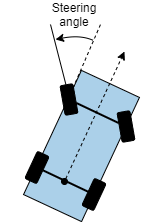
CurrSteer - Текущий угол поворота рулевого управленияТекущий угол поворота транспортного средства в градусах, определяемый как действительный скаляр. Это значение является положительным в направлении против часовой стрелки.
Дополнительные сведения см. в разделе Системы координат в автоматизированной панели инструментов вождения.
Чтобы включить этот порт, установите для модели транспортного средства значение Dynamic bicycle model.
SteerCmd - Команда угла поворота рулевого управленияКоманда угла поворота, в градусах, возвращается как действительный скаляр. Это значение является положительным в направлении против часовой стрелки.
Дополнительные сведения см. в разделе Системы координат в автоматизированной панели инструментов вождения.
По мере изменения среды транспортного средства можно переключаться между велосипедными моделями. Добавьте два блока бокового контроллера Стэнли в вариационную подсистему и укажите другую модель велосипеда для каждого блока. Пример см. в разделе Учебное пособие по боковому управлению.
Для вычисления команды угла поворота контроллер минимизирует ошибку положения и ошибку угла текущего положения относительно опорного положения. Направление движения транспортного средства определяет эти значения ошибок.
Когда транспортное средство движется вперед (параметр Direction имеет значение 1):
Погрешность положения - боковое расстояние от центра передней оси до опорной точки на траектории.
Погрешность угла - это угол переднего колеса относительно опорной траектории.
Когда транспортное средство движется в обратном направлении (параметр Direction имеет значение -1):
Погрешность положения - боковое расстояние от центра задней оси до опорной точки на пути.
Погрешность угла представляет собой угол заднего колеса относительно исходной траектории.
Подробнее о том, как контроллер минимизирует эти ошибки для кинематических и динамических моделей велосипедов, см. [1].
[1] Гофман, Габриэль М., Клэр Дж. Томлин, Майкл Монтемерло и Себастьян Трюн. «Отслеживание автономных автомобильных траекторий для внедорожного вождения: дизайн контроллера, экспериментальная валидация и гонки». Американская конференция по контролю. 2007, стр 2296–2301. doi:10.1109/ACC.2007.4282788


