Сглаживание траектории транспортного средства с помощью интерполяции кубических сплайнов
Автоматизированная панель инструментов вождения
Блок сглаживания траектории создает гладкую траекторию транспортного средства, состоящую из последовательности дискретизированных позиций, путем подгонки входных опорных точек траектории к кубическому сплайну. Учитывая направления входного опорного пути, блок также возвращает направления, которые соответствуют каждой позе.
Этот блок используется для преобразования контура C1-continuous в контур C2-continuous. C1-continuous пути включают пути Dubins или Reeds-Shepp, возвращаемые планировщиками путей. Дополнительные сведения об этих типах путей см. в разделе Пути C1-Continuous и C2-Continuous.
Возвращенные позы и направления можно использовать с контроллером транспортного средства, таким как блок бокового контроллера Стэнли.
Путь является C1-continuous, если его производная существует и является непрерывной. Контуры, C1-continuous только имеют разрывы кривизны. Например, траектория, состоящая из сегментов Dubins или Reeds-Sheep, имеет разрывы кривизны в точках соединения сегментов. Эти разрывы приводят к изменениям в направлении, которые недостаточно гладки для движения с пассажирами.
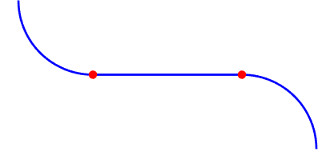
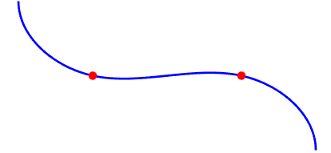
Путь также C2-continuous, если его вторая производная существует и является непрерывной. C2-continuous дорожки имеют непрерывную кривизну и достаточно гладкие для движения с пассажирами.
Алгоритм сглаживания траектории интерполирует параметрический кубический сплайн, который проходит через все входные опорные точки позы. Параметр сплайна - кумулятивная длина хорды в этих точках. [1]
Касательное направление сглаженной выходной траектории приблизительно соответствует углу ориентации транспортного средства в начальной и целевой позициях.
[1] Поплавок, Майкл С. «Об отклонении параметрического кубического сплайна от его полигона данных». Автоматизированное геометрическое проектирование. Том 25, номер 3, 2008, стр. 148-156.
[2] Лепетик, Марко, Грегор Кланкар, Игорь Скрыан, Драго Матко и Бостьян Поточник. «Планирование оптимального пути времени с учетом пределов ускорения». Робототехника и автономные системы. Том 45, номера 3-4, 2003, стр. 199-210.

