Формирование профиля скорости пути транспортного средства с учетом кинематических ограничений
Автоматизированная панель инструментов вождения
Блок Velocity Profiler генерирует профиль скорости траектории движения, который удовлетворяет этому набору заданных кинематических ограничений:
Максимально допустимая скорость транспортного средства
Максимальное продольное ускорение и замедление транспортного средства
Максимальный продольный рывок транспортного средства
Максимальное боковое ускорение транспортного средства
Задайте суммарные длины вдоль траектории и направления движения и кривизны в каждой точке вдоль траектории. Эти значения можно получить из выходных данных блока сглаженного сплайна траектории. Укажите также продольную скорость транспортного средства в начале и в конце пути.
Используйте сгенерированный профиль скорости в качестве входных опорных скоростей продольного контроллера, как показано в примере автоматической парковки в Simulink.
Чтобы создать профиль скорости для траектории привязки, блок Velocity Profiler выполняет следующие действия.
Создайте профиль непрерывной скорости, удовлетворяющий всем кинематическим ограничениям (скорость, ускорение и толчок), заданным параметрами блока.
Дискретизируйте профиль скорости, отображая позы на опорном пути к значениям скорости, исходя из того, как далеки позы от начальной позы. Суммарные длины пути, указанные во входном порту CumLengths, содержат эти расстояния. Блок «Сглаженный сплайн траектории» возвращает эти суммарные длины траектории вместе с гладкой траекторией.
Сформированный профиль скорости представляет собой кривую с семью интервалами. В каждом временном интервале в пределах кривой толчок, ускорение и скорость транспортного средства изменяются для удовлетворения заданных ограничений. На рисунке и в таблице показано, как эти значения изменяются для транспортного средства, движущегося вперед по траектории. Для простоты начальные и конечные скорости транспортного средства, определяемые входными портами StartVelocity и EndVelocity, являются 0.
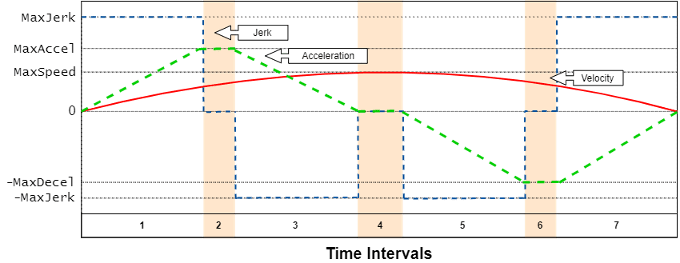
| Интервал времени | Толчок | Ускорение | Скорость | Примечания |
|---|---|---|---|---|
| 1 | Установить в значение MaxJerk | Увеличение от 0 кому MaxAccel | Увеличение от начальной скорости | - |
| 2 | Установить в значение 0 | Удерживается постоянным в MaxAccel | Продолжает увеличиваться | В течение предыдущего интервала, если транспортное средство не может достичь MaxAccel учитывая MaxSpeed ограничение, то интервал 2 не возникает. |
| 3 | Установить в значение -MaxJerk | Уменьшение от MaxAccel кому 0 | Увеличение до MaxSpeed | - |
| 4 | Установить в значение 0 | Удерживается постоянным в 0 | Удерживается постоянным в MaxSpeed | - |
| 5 | Установить в значение -MaxJerk | Уменьшение от 0 кому -MaxDecel | Начинает уменьшаться | - |
| 6 | Установить в значение 0 | Удерживается постоянным в -MaxDecel | Продолжает уменьшаться | В течение предыдущего интервала, если транспортное средство не может достичь -MaxDecel учитывая MaxSpeed ограничение, то интервал 6 не возникает. |
| 7 | Установить в значение MaxJerk | Увеличение от -MaxDecel кому 0 | Уменьшение до конечной скорости | - |
На рисунке и в таблице:
MaxJerk и -MaxJerk задаются параметром Максимальный продольный рывок (м/с ^ 3).
MaxAccel и -MaxDecel задаются параметрами Максимальное продольное ускорение (м/с ^ 2) и Максимальное продольное замедление (м/с ^ 2) соответственно. Для этих параметров можно задать асимметричные значения.
MaxSpeed задается параметром Максимальная допустимая скорость (м/с).
Для транспортного средства, движущегося в обратном направлении, кривые на рисунке являются реверсивными. Знаки значений параметров, показанные на рисунке и в таблице, также сторнируются.
Если транспортное средство включает в себя множество изменений в направлении, блок генерирует отдельные профили скорости для каждого направления движения. Затем блок объединяет эти профили в конечном выводе Velocities. Пример см. в разделе Профиль скорости траектории с изменением кривой и направления.
[1] Вильягра, Хорхе, Висенте Миланес, Джошуэ Перес и Хорхе Годой. «Плавное планирование пути и скорости для автоматизированного транспортного средства общего пользования». Робототехника и автономные системы. Том 60, номер 2, февраль 2012, стр. 252-265.



