Automated Driving Toolbox™ позволяет моделировать алгоритмы вождения в виртуальной среде, в которой используется Unreal Engine ® от Epic Games ®. В общем случае системы координат, используемые в этой среде, соответствуют правилам, описанным в разделе Системы координат в автоматизированной панели инструментов вождения. Однако при моделировании в этой среде важно иметь в виду конкретные различия и детали реализации систем координат.
Как и в случае других функций автоматизированной панели инструментов управления, в среде моделирования используется правосторонняя декартова мировая система координат, определенная в ISO 8855. На следующем 2D виде сверху виртуальной сцены Mcity показаны координаты X и Y.
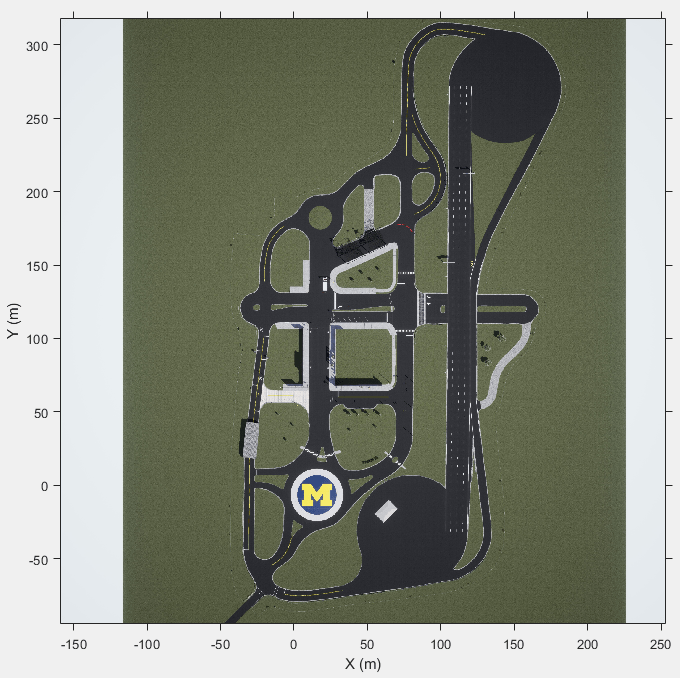
В этой системе координат, если смотреть в положительном направлении оси X, положительные точки оси Y остаются. Положительная ось Z указывает от основания вверх. Углы рыскания, тангажа и крена являются положительными по часовой стрелке, если смотреть в положительных направлениях осей Z-, Y- и X соответственно. Если смотреть сцену с 2D перспективы сверху вниз, то угол рыскания будет против часовой стрелки положительным, поскольку вы просматриваете сцену в отрицательном направлении оси Z.
Транспортные средства размещены в мировой системе координат сцен. На рисунке показано, как определение портов X, Y и Yaw в блоках «Имитация 3D транспортного средства» с фюзеляжем определяет их размещение в сцене.
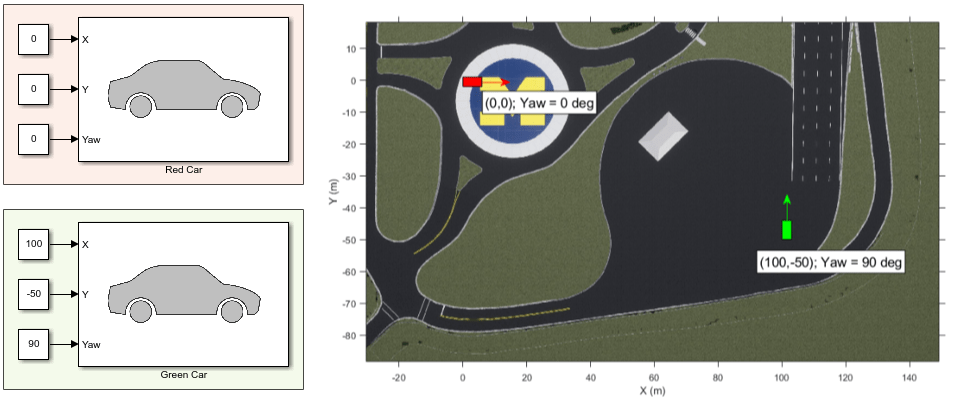
Угол подъема и наклона грунта определяет ось Z, угол крена и угол наклона транспортных средств.
Редактор Unreal ® использует декартову систему координат левого мира, в которой положительная ось Y указывает вправо. При преобразовании из нереальной системы координат редактора в систему координат среды 3D необходимо развернуть знак оси Y и угла наклона. Оси X, Z, угол крена и угол рыскания одинаковы в обеих системах координат.
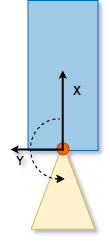
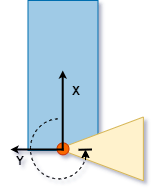
Система координат транспортного средства основана на мировой системе координат. В этой системе координат:
Ось X указывает вперед от транспортного средства.
Ось Y указывает влево от транспортного средства.
Ось Z указывает вверх от земли.
Крен, шаг и рыскание являются положительными по часовой стрелке при взгляде в прямом направлении осей X, Y и Z соответственно. Как и в мировой системе координат, при взгляде на транспортное средство сверху вниз, тогда угол рыскания против часовой стрелки-положительный.
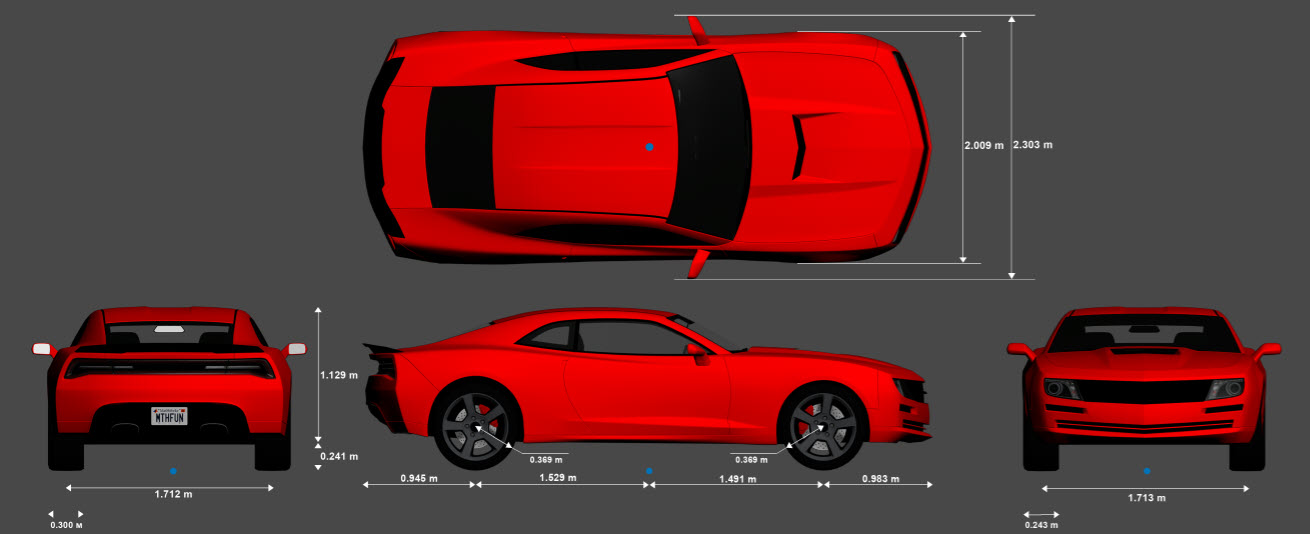
Начало движения транспортного средства находится на земле в геометрическом центре транспортного средства. На этом рисунке синяя точка представляет начало координат транспортного средства.
При добавлении в модель блока датчика, например блока Simulation 3D Camera, можно установить датчик в заданное местоположение транспортного средства, например передний бампер корневого центра. Эти места установки находятся в системе координат транспортного средства. При указании смещения от этих расположений выполняется смещение от начала координат монтажного расположения, а не от начала координат транспортного средства.
Эти уравнения определяют координаты транспортного средства для датчика с местоположением (X, Y, Z) и ориентацией (крен, шаг, рыскание):
(X, Y, Z) = (Xmount + Xoffset, Ymount + Yoffset, Zmount + Zoffset)
(Roll, Pitch, Yaw) = (Rollmount + Rolloffset, Pitchmount + Pitchoffset, Yawmount + Yawoffset)
Переменные «монтирования» относятся к заранее определенным местам установки относительно начала координат транспортного средства. Эти монтажные расположения определяются в параметре Монтажное расположение блока датчика.
Переменные «смещения» относятся к величине смещения от этих мест установки. Эти смещения определяются в параметрах относительного перемещения [X, Y, Z] (m) и относительного вращения [Roll, Pitch, Yaw] (градус) блока датчика.
Например, рассмотрим датчик, установленный на Rear bumper местоположение. Относительно исходного положения транспортного средства датчик имеет ориентацию (0, 0, 180). Другими словами, при взгляде на транспортное средство сверху вниз угол рыскания датчика поворачивается против часовой стрелки на 180 градусов.
Чтобы указать датчик на 90 градусов дальше вправо, необходимо установить для параметра Relative rotation (относительный поворот) [Roll (наклон), Pitch (шаг), Yaw (рыскание)] (град) значение [0,0,90]. Другими словами, датчик поворачивается на 270 градусов против часовой стрелки относительно исходного положения транспортного средства, но поворачивается только на 90 градусов против часовой стрелки относительно исходного положения заданного заднего бампера.
В среде кубовидного моделирования, как описано в разделе Cuboid Scription Simulation, начало координат находится на земле, ниже центра задней оси транспортного средства.
| Происхождение Cuboid Vehicle | 3D Происхождение имитационного транспортного средства |
|---|---|
|
|
При преобразовании положений датчиков между системами координат необходимо учитывать эту разницу в начале координат с помощью блока «Cuboid To 3D Simulation». Пример модели, в которой используется этот блок, см. в разделе Дорожная полоса следования.
Нереальный редактор использует левостороннюю декартову систему координат транспортного средства, в которой положительная ось Y указывает вправо. При преобразовании из системы координат «Нереальный редактор» в систему координат среды «Нереальный механизм» необходимо развернуть знак оси Y и угла наклона. Оси X, Z, угол крена и угол рыскания одинаковы в обеих системах координат.
Моделирование Cuboid To 3D | Имитация 3D транспортного средства со следующим грунтом


