Приложение Ground Truth Labeler позволяет маркировать данные облака точек, полученные от датчиков лидара. Для маркировки облаков точек используются кубоиды, представляющие собой 3-D ограничивающие рамки, которые прорисовываются вокруг точек в облаке точек. Можно использовать cuboid-метки для создания основных данных истинности для детекторов учебных объектов.
В этом примере выполняется маркировка данных облака точек лидара с помощью кубоидов.
Загрузите последовательность облаков точек в приложение и определите cuboid-метку.
Откройте приложение Ground Truth Labeler. Введите эту команду в командной строке MATLAB ®.
groundTruthLabeler
На панели инструментов приложения выберите Импорт > Добавить сигналы.
В диалоговом окне «Добавление/удаление сигнала» установите для параметра «Тип источника» значение Point Cloud Sequence.
В параметре Имя папки найдите lidarSequence , которая содержит последовательность облаков точек. matlabrootmatlabroot функция.
matlabroot\toolbox\driving\drivingdata\lidarSequenceНажмите кнопку «Добавить источник» для загрузки последовательности облаков точек с использованием меток времени по умолчанию. Затем нажмите кнопку OK, чтобы закрыть диалоговое окно Add/Remove Signal. Приложение отображает первое облако точек в последовательности.
На панели Наклейки окупаемости инвестиций в левой части приложения щелкните Наклейка.
Создать Rectangle/Cuboid метка с именем car. Нажмите кнопку ОК.
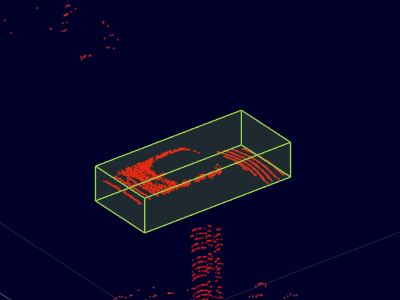
На этом рисунке показана настройка приложения Ground Truth Labeler после выполнения следующих действий.
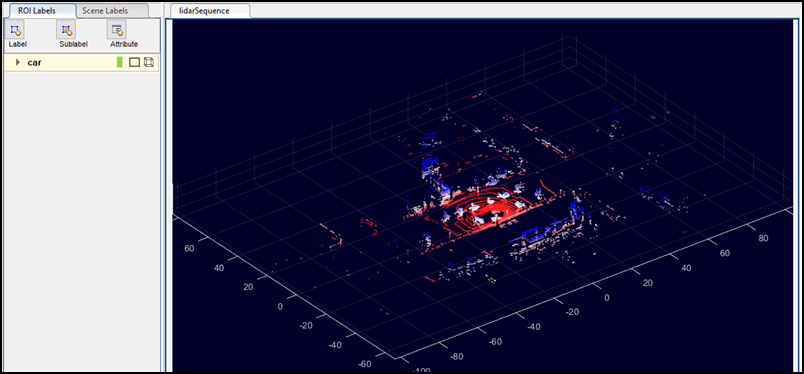
Параметры зумирования, панорамирования и поворота 3-D позволяют находить и маркировать интересующие объекты в облаке точек. Эти инструменты используются для увеличения масштаба и центрирования транспортного средства ego в первой рамке облака точек. Эго-транспортное средство расположено в начале облака точек.
В правом верхнем углу рамки нажмите кнопку «Увеличить».![]()
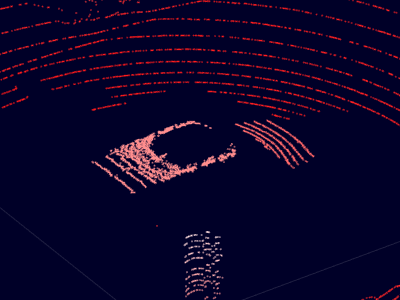
Нажимайте на средство ego, пока вы не увеличите масштаб изображения, чтобы увидеть точки, которые его составляют.
При необходимости можно использовать кнопку «Панорамирование![]() » или «Повернуть 3D
» или «Повернуть 3D![]() » для просмотра большего количества точек эго-транспортного средства. Для просмотра дополнительных параметров просмотра или поворота облака точек нажмите кнопку «Повернуть 3D», а затем щелкните правой кнопкой мыши рамку облака точек. Предоставляемые опции являются теми же опциями, что и
» для просмотра большего количества точек эго-транспортного средства. Для просмотра дополнительных параметров просмотра или поворота облака точек нажмите кнопку «Повернуть 3D», а затем щелкните правой кнопкой мыши рамку облака точек. Предоставляемые опции являются теми же опциями, что и pcshow функция.
Данные облака точек включают точки от земли, что может затруднить изоляцию точек эго-транспортного средства. Приложение предоставляет возможность скрыть землю с помощью segmentGroundFromLidarData функция.
Скрыть точки грунта от облака точек. На панели инструментов приложения на вкладке «Лидар» щелкните Скрыть грунт. Этот параметр применяется ко всем кадрам в облаке точек.
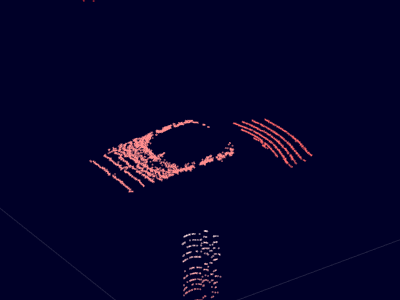
Эта опция скрывает только землю от дисплея. Он не удаляет данные заземления из облака точек. При создании метки сечения облака точек, содержащего скрытые точки грунта, при экспорте меток истинности грунта эти точки грунта являются частью этой метки.
Чтобы настроить алгоритм скрытия грунта, щелкните Настройки грунта (Ground Settings) и настройте параметры в диалоговом окне Скрытие грунта (Hide Ground).
Маркировка эго-транспортного средства с помощью кубовидной метки.
На панели ROI Labels слева щелкните на этикетке автомобиля.
Выберите кадр последовательности точек лидара, щелкнув вкладку lidarSequence.
Примечание
Чтобы включить ярлыки сочетаний клавиш, необходимо сначала выбрать сигнальный кадр.
Перемещайте указатель над эго-транспортным средством до тех пор, пока серый кубоид предварительного просмотра не будет окружать точки эго-транспортного средства. Точки, заключенные в кубик предварительного просмотра, выделяются желтым цветом.
Чтобы изменить размер куба предварительного просмотра, удерживайте клавишу A и перемещайте колесо прокрутки мыши вверх или вниз.
При необходимости, чтобы изменить размер куба предварительного просмотра только в направлении X, Y или Z, переместите колесо прокрутки вверх и вниз, удерживая клавиши X, Y или Z.
Щелкните кадр сигнала, чтобы нарисовать кубоид. Поскольку по умолчанию на панели инструментов приложения выбран параметр «Сжать до вписывания», кубоид сжимается, чтобы уместить точки внутри него.
Для получения дополнительной информации о маркировке облаков точек на панели инструментов приложения щелкните Привязать к кластеру. При метке с помощью этой опции кубоид привязывается к ближайшему кластеру облаков точек с помощью segmentLidarData функция. Чтобы настроить кластеризацию облаков точек, нажмите «Параметры кластера» и настройте параметры в диалоговом окне. Для просмотра кластеров облаков точек при перемещении между кадрами выберите в этом диалоговом окне «Просмотреть кластеры». Во время воспроизведения сигнала визуализация кластеров облаков точек отключена.
После рисования метки cuboid можно изменить размер или переместить ее, чтобы сделать метку более точной. Например, в предыдущей процедуре опция «Усадка по посадке» сокращает кубовидную метку в соответствии с обнаруженными точками эго-транспортного средства. Фактическое эго-транспортное средство немного больше, чем этот кубоид. Расширяйте размер этого кубоида до тех пор, пока он более точно не отразит размер эго-транспортного средства.
Чтобы включить сочетание клавиш для меток облака точек, убедитесь, что выбрана вкладка lidarSequence.
В сигнальном кадре щелкните на нарисованной кубовидной метке. Перетащите грани, чтобы развернуть кубоид.
Перемещайте кубоид до его центрирования на эго-транспортном средстве. Удерживая нажатой клавишу Shift, перетащите грани кубовида.
При нанесении меток на объекты между фреймами можно копировать кубовидные метки и вставлять их в другие фреймы.
Выберите кубоид для транспортного средства ego и нажмите Ctrl + C, чтобы скопировать его.
В нижней части приложения нажмите кнопку Следующий кадр![]() , чтобы перейти к следующему кадру.
, чтобы перейти к следующему кадру.
Нажмите клавиши CTRL + V, чтобы вставить кубоид в рамку.
Можно также использовать алгоритм автоматизации для применения метки к нескольким кадрам. Приложение предоставляет встроенный алгоритм временной интерполяции для маркировки облаков точек в промежуточных кадрах. Пример, показывающий, как применять этот алгоритм автоматизации, см. в разделе Маркировка истинности земли для нескольких сигналов.
Приложение предоставляет дополнительные возможности для настройки отображения сигнальных кадров.
Для дополнительного управления отображением облака точек на вкладке «Лидар» можно изменить параметры карты цветов. Можно также изменить значения карты цветов, изменив параметр «Значение карты цветов», который имеет следующие опции:
Z Height - значения карты цветов увеличиваются вдоль оси Z. Выберите этот параметр при поиске объектов над землей, таких как дорожные знаки.
Radial Distance - Значения карты цветов увеличиваются от начала координат облака точек. Выберите эту опцию при поиске объектов, находящихся далеко от начала координат.
На вкладке «Лидар» панели инструментов приложения в разделе «Вид камеры» содержатся параметры изменения перспективы, с которой просматривается облако точек. Эти виды центрируются в начале координат облака точек, которое является предполагаемым положением эго-носителя.
Из этих представлений можно выбрать:
Вид с высоты птичьего полета - просмотр облака точек непосредственно над эго-транспортным средством.
Chase View - просмотр облака точек с нескольких метров позади эго-транспортного средства.
Вид Ego - просмотр облака точек изнутри транспортного средства ego.
Эти виды предполагают, что транспортное средство движется по положительному направлению х облака точек. Если транспортное средство движется в другом направлении, установите соответствующую опцию в параметре Ego Direction.
Эти виды используются при проверке меток облака точек. Избегайте использования этих представлений при создании меток. Вместо этого используйте вид по умолчанию и найдите объекты для маркировки с помощью опций панорамирования, зумирования и поворота.
