Маркировка исходных данных для автоматизированных приложений вождения
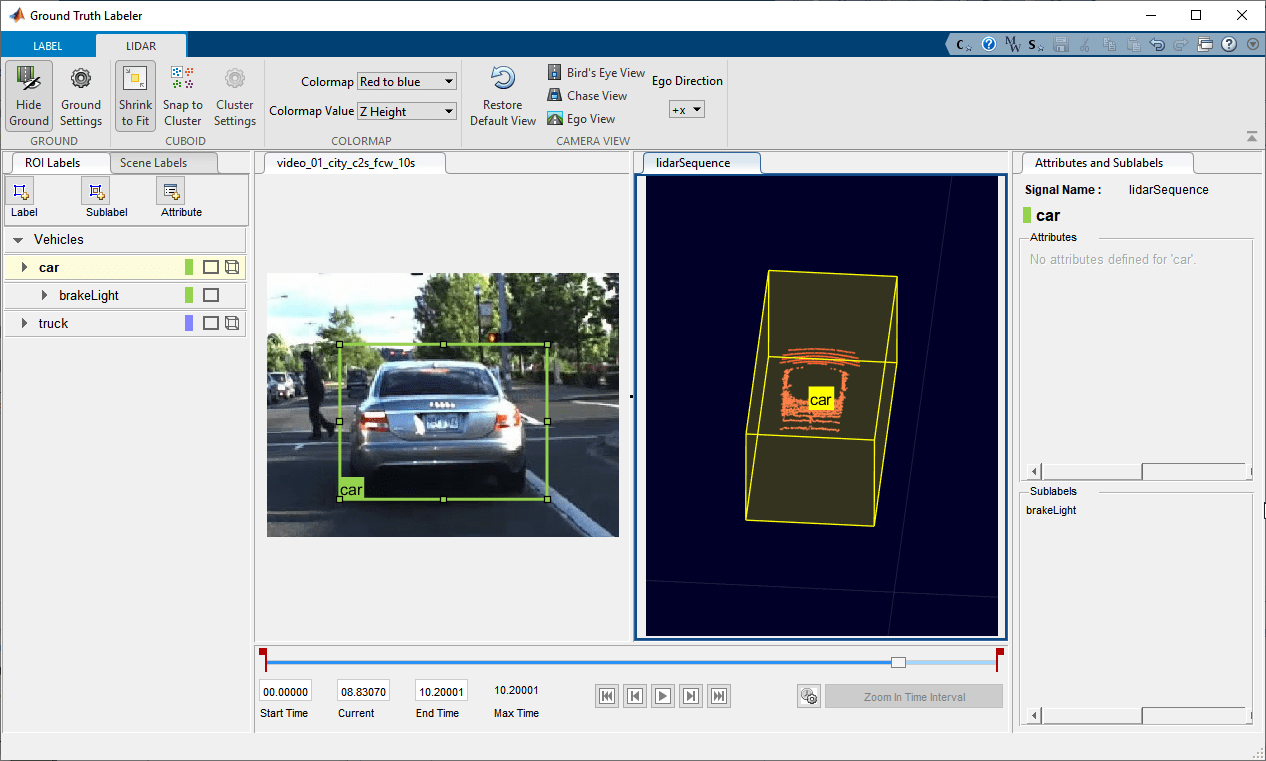
Приложение Ground Truth Labeler позволяет маркировать исходные данные в нескольких видеороликах, последовательностях изображений или облаках точек лидара.
С помощью приложения можно:
Одновременно маркировать несколько перекрывающихся во времени сигналов, представляющих одну и ту же сцену.
Определите метки прямоугольной области интереса (ROI), метки окупаемости инвестиций в полилинию, метки окупаемости инвестиций в пиксель, метки окупаемости инвестиций в кубоид для маркировки лидара и определения меток сцены. Используйте эти метки для интерактивной маркировки данных истинности земли.
Используйте встроенные алгоритмы обнаружения или отслеживания для маркировки данных истинности земли.
Запись, импорт и использование пользовательских алгоритмов автоматизации для автоматической маркировки основных данных.
Оцените производительность алгоритмов автоматизации этикеток с помощью визуальной сводки.
Экспорт меток истинности основания как groundTruthMultisignal объект. Этот объект можно использовать для проверки системы или для обучения детектора объекта или семантической сети сегментации.
Отображение синхронизированных по времени сигналов, таких как данные шины CAN, с помощью driving.connector.Connector API.
Дополнительные сведения об этом приложении см. в разделе Начало работы с маркером истины.
MATLAB ® Toolstrip: На вкладке Приложения в разделе Автомобильный щелкните значок приложения.
командная строка MATLAB: Enter groundTruthLabeler.
Сигналы Lidar не поддерживают метки линии или пиксельной окупаемости инвестиций.
Пиксельные метки ROI не поддерживают суббнаки или атрибуты.
Метки Cuboid ROI не поддерживают суббнаки.
Окно Сводка по меткам (Label Summary) не поддерживает подмаркировки или атрибуты
В левой части окна «Метки окупаемости инвестиций» содержатся определения меток интересующей области (ROI), которые можно пометить на кадрах. Определения меток можно создавать непосредственно на этой панели. Можно также создать определения меток программным путем с помощью labelDefinitionCreatorMultisignal и затем импортировать эти определения меток в сеанс приложения.
Приложение поддерживает определение меток окупаемости инвестиций, суббнаков и атрибутов.
Метка ROI представляет собой метку, которая соответствует интересующей области (ROI) в сигнальном кадре. В таблице описаны поддерживаемые типы меток.
| Метка окупаемости инвестиций | Описание | Сцена |
|---|---|---|
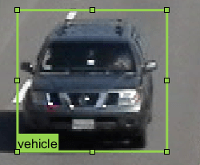
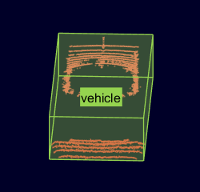
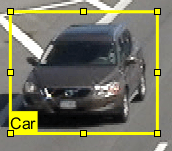
Rectangle/Cuboid | Нарисуйте вокруг объектов прямоугольные или кубические метки окупаемости инвестиций в зависимости от типа сигнала.
| Транспортные средства, пешеходы, дорожные знаки
|
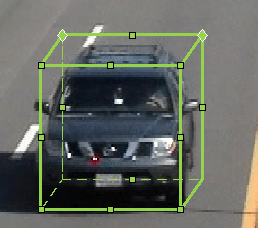
Projected cuboid | Нарисуйте кубоидальные метки окупаемости инвестиций (3-D ограничивающие рамки). |
|
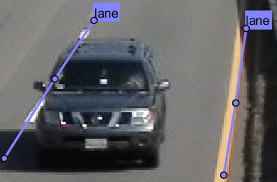
Line | Нарисуйте линейные метки окупаемости инвестиций для представления линий. Для построения полилинии необходимо использовать две или более точек. | Границы полос, ограждающие рельсы, дорожные бордюры
|
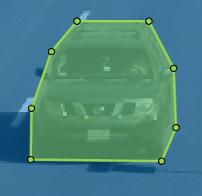
Pixel label | Назначение меток пикселям для семантической сегментации. Можно маркировать пикселы вручную с помощью полигонов, кистей или заливки заливкой. Дополнительные сведения о маркировке пикселей см. в разделе Пиксели меток для семантической сегментации. | Транспортные средства, дорожное покрытие, деревья, дорожное покрытие
|
Polygon | Нарисуйте метки окупаемости инвестиций в многоугольники. Можно маркировать отдельные экземпляры одного класса. Дополнительные сведения о рисовании меток окупаемости инвестиций для полигонов и семантических сетей сегментации см. в разделе Объекты-метки с использованием полигонов. | Транспортные средства, дорожное покрытие, деревья, дорожное покрытие
|
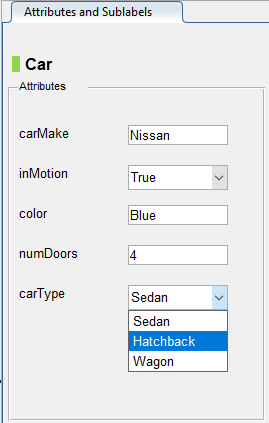
Подмаркировка ROI - это метка ROI, которая принадлежит родительской метке. Используйте подмаркировку ROI, чтобы предоставить более подробную информацию о ROI в помеченных данных истинности земли. Например, этикетка транспортного средства может содержать фару, licensePlate и подметку колеса. Надписи можно создавать только для прямоугольных меток и меток полилиний. Дополнительные сведения о суббаллах см. в разделе Использование суббалл и атрибутов для маркировки данных истинности основания.
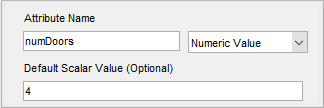
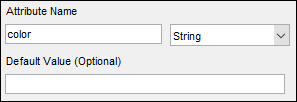
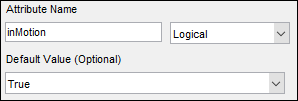
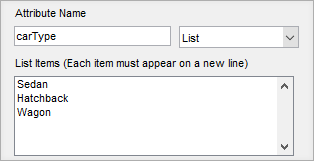
Атрибут ROI указывает дополнительную информацию о метке ROI или субкниге. Например, в сцене вождения атрибуты могут включать тип или цвет транспортного средства. В таблице описаны поддерживаемые типы атрибутов.
| Тип атрибута | Образец определения атрибута | Примеры значений по умолчанию |
|---|---|---|
|
|
|
|
| |
|
| |
|
|
Дополнительные сведения об атрибутах см. в разделе Использование суббнаков и атрибутов для маркировки данных истинности основания.
Чтобы избежать необходимости повторно маркировать истину земли новыми метками, организуйте схему маркировки, которую вы хотите использовать, прежде чем маркировать истину земли.
Можно копировать и вставлять метки между сигналами одного типа.
driving.connector.Connector | vision.labeler.AutomationAlgorithm | vision.labeler.loading.MultiSignalSource | vision.labeler.mixin.Temporal