Toolbox™ Sensor Fusion and Tracking позволяет отслеживать ориентацию, положение, позу и траекторию платформы. Платформа обычно относится к любому объекту, который требуется отслеживать.
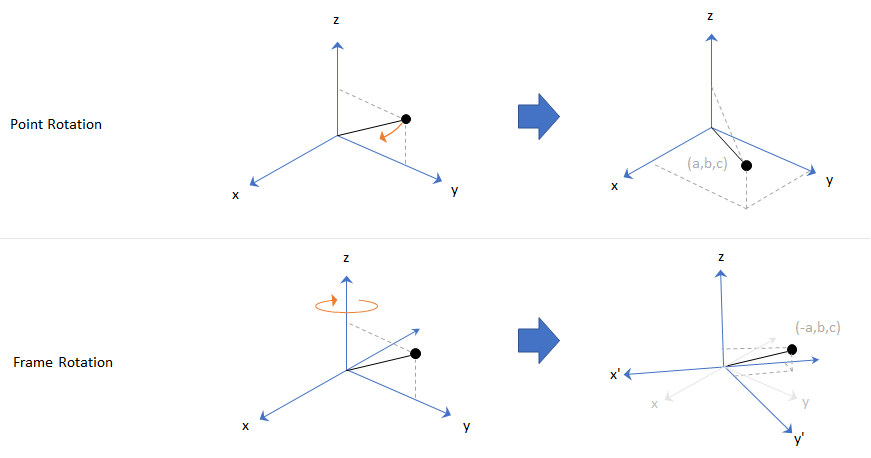
Ориентация определяется угловым смещением. Ориентация может быть описана в терминах поворота точки или рамы. При вращении точки система координат является статической, и точка перемещается. При повороте рамки точка является статической, и система координат перемещается. Для данной оси и угла поворота поворот точки и поворота рамы определяет эквивалентное угловое смещение, но в противоположных направлениях.
По умолчанию для панели инструментов слияния и отслеживания датчиков используется поворот рамки.
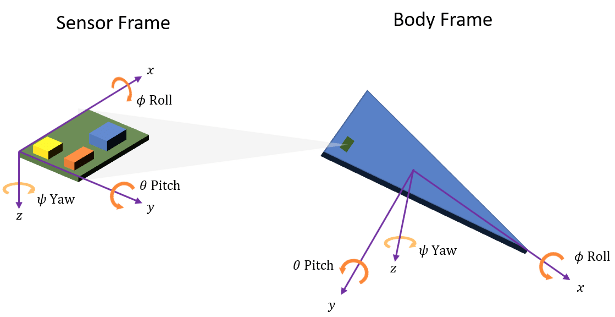
Ориентация определяется как поворот рамки, который приводит родительский кадр к дочернему кадру. Выбор родительского кадра зависит от проблемного пространства. Например, манипулирование кадрами датчиков необходимо для выравнивания различных осей независимых датчиков. Слежение за рамой кузова часто используется для задач стабилизации. Наземный опорный кадр полезен для слежения за несколькими независимыми платформами и определения местоположения платформ в абсолютном смысле.
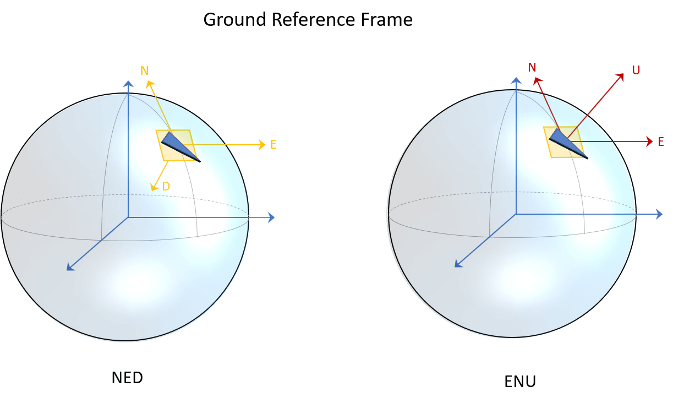
Sensor Fusion and Tracking Toolbox в основном поддерживает координатную рамку NED (север-восток вниз). Во многих элементах можно также использовать рамку координат RUS (восток-север-вверх).
Чтобы связать одну ориентацию с другой, необходимо повернуть рамку. В таблице представлены соглашения о ротации, которые использует панель инструментов Sensor Fusion и Tracking Toolbox. Трехосная координата всегда задается в порядке [x, y, z].
| Переменная | Угол Эйлера | Символ | Интервал вывода (градусы) |
|---|---|---|---|
| z | Отклонение от курса | ψ |
−180 ≤ ψ < 180 |
| y | Подача | θ |
−90 ≤ θ ≤ 90 |
| x | Список | ϕ |
−180 ≤ ϕ < 180 |
Положительный угол поворота соответствует повороту по часовой стрелке вокруг оси при просмотре от начала координат вдоль положительного направления оси. Правостороннее соглашение эквивалентно, где положительное вращение обозначается направлением, в котором пальцы правой руки сворачиваются, когда большой палец указывает в направлении оси вращения.
Для определения поворота трехмерного каркаса необходимо последовательно поворачивать вокруг осей. Sensor Fusion and Tracking Toolbox использует собственное (несущее) вращение, при котором после каждого вращения ось обновляется до следующего вращения. Например, чтобы повернуть ось с помощью соглашения ZYX:
Поверните родительскую рамку вокруг оси z, чтобы получить новый набор осей (x ', y', z), где оси x и y изменились на оси x '- и y', а ось z остается неизменной.
xyz]
Поверните новый набор осей вокруг оси y ', получая другой новый набор осей, (x ", y', z ').
x 'y' z]
Поверните этот новый набор осей вокруг оси x «-axis, достигнув нужного дочернего кадра, (x», y «, z»).
y 'z']
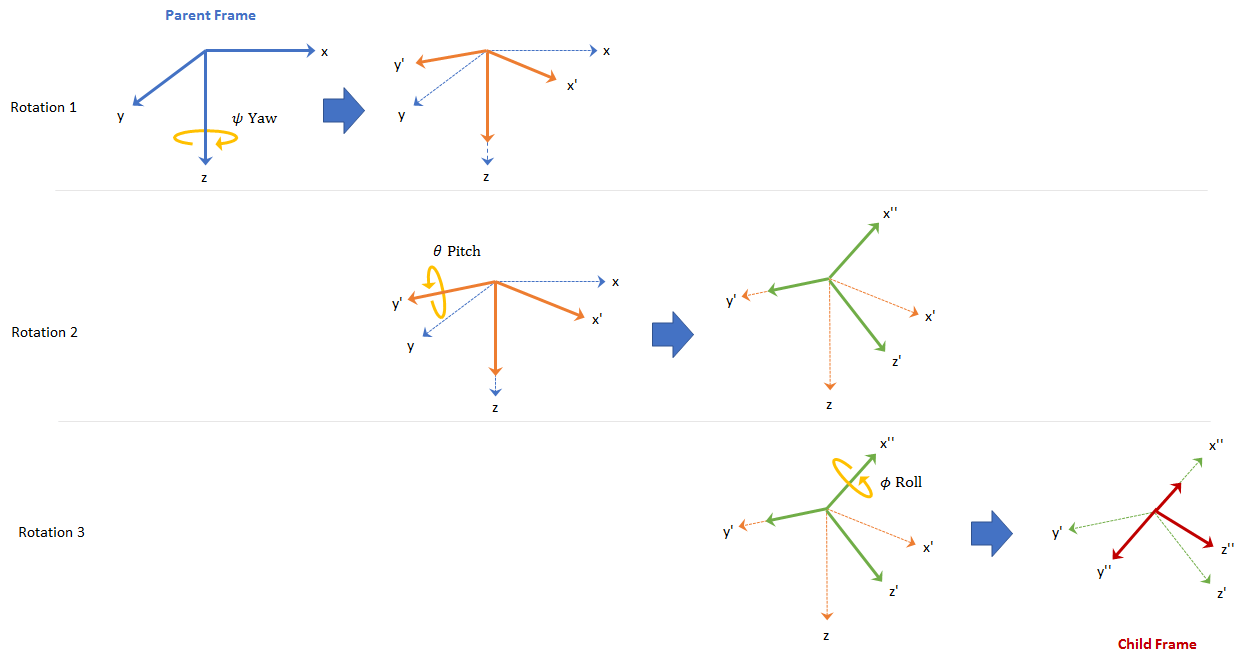
Эта последовательность вращений соответствует условию, изложенному в [1]. Матрица поворота, необходимая для преобразования вектора в родительском кадре в вектор в дочернем кадре для заданного рыскания, шага и крена, вычисляется следующим образом:
"
Для функций, поддерживающих обработку на основе кадров, Sensor Fusion and Tracking Toolbox предоставляет координаты в виде матрицы N-by-3, где N - количество выборок во времени, а три столбца соответствуют осям x, y и z. Следующий расчет поворачивает родительский кадр к дочернему.
Панель инструментов Sensor Fusion and Tracking Toolbox обеспечивает эффективное вычисление ориентации с помощью quaternion тип данных. Чтобы создать матрицу вращения с помощью кватернионов, используйте rotmat функция.
% Euler angles defining orientation of local axes yaw = 20; pitch = 5; roll = 10; % Create orientation matrix from Euler angles using quaternion class q = quaternion([yaw pitch roll],'eulerd','zyx','frame'); myRotationMatrix = rotmat(q,'frame');
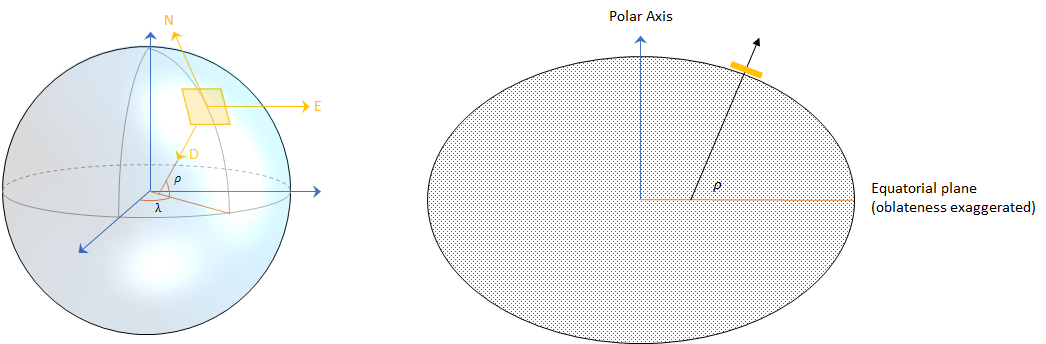
Позиция определяется как расстояние перемещения от исходной точки родительского кадра до исходной точки дочернего кадра. Например, возьмем в качестве родительского кадра локальную систему координат NED. В системе координат NED:
Начало координат произвольно фиксируется к точке на поверхности Земли. Это делает систему координат NED локальной.
Ось X указывает на эллипсоид на север.
Ось Y указывает на эллипсоид на восток.
Ось Z указывает вниз вдоль эллипсоидной нормали (геодезическая широта, "" "" "" ").
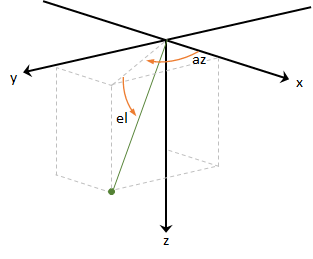
Учитывая вектор в R3:
Азимут определяется как угол от оси x до ортогональной проекции вектора на плоскость xy. Угол положителен от оси X к оси Y. Азимут задается в градусах в диапазоне [− 180, 180).
Отметка определяется как угол от проекции на плоскость xy к вектору. Угол положителен от плоскости xy к оси Z. Отметка дана в градусах в диапазоне [− 90, 90].
Чтобы полностью указать объект в 3-D пространстве, можно объединить положение и ориентацию. Поза определяется как комбинация положения и ориентации. При описании позы в панели инструментов Sensor Fusion and Tracking Toolbox используются следующие условные обозначения.
| Свойство/поле | Описание | Единицы | Координатная рамка |
|---|---|---|---|
| Положение | Текущее положение платформы в сценарии | m | NED или RUS |
| Скорость | Текущая скорость платформы в сценарии | м/с | NED или RUS |
| Ускорение | Текущее ускорение платформы в сценарии | м/с2 | NED или RUS |
| Ориентация | Текущая ориентация платформы в сценарии | единичная матрица кватерниона/ориентации | Н/Д |
| Угловая скорость | Текущая угловая скорость платформы в сценарии | рад/с | NED или RUS |
Траектория определяет изменение позы во времени. Для создания траекторий «земля-истина» в панели инструментов Sensor Fusion and Tracking Toolbox используйте kinematicTrajectory или waypointTrajectory. Для моделирования отслеживания нескольких платформ используйте trackingScenario.
quaternion | Повороты, ориентация и кватернионы
[1] IEEE. Стандарт для распределенного интерактивного моделирования - прикладные протоколы. IEEE P1278.1/D16 Ред. 18, май 2012 г.
