Разработка сценариев отслеживания, настройка платформ и датчиков, а также создание обнаружений синтетических объектов
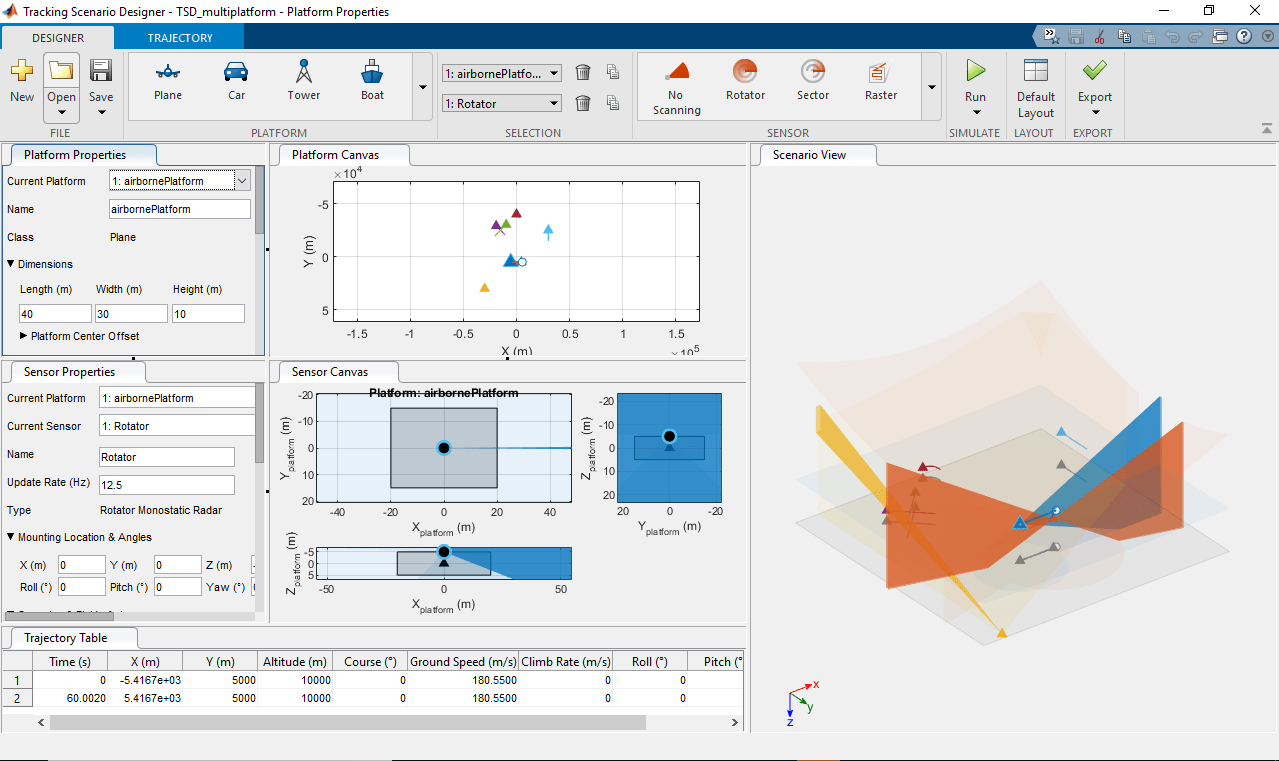
Приложение Tracking Script Designer позволяет разрабатывать и визуализировать синтетические сценарии отслеживания для тестирования систем оценки и отслеживания.
С помощью приложения можно:
Создание платформ (включая самолеты, автомобили, башни и лодки) с помощью интерактивного интерфейса и настройка свойств платформы в сценарии отслеживания.
Настройте 2D или 3D траектории (включая положение, ориентацию и скорости) платформ с использованием траекторий ППМ в сценарии отслеживания.
Создайте радиолокационные датчики, установленные на платформе, и настройте их свойства.
Моделирование сценария отслеживания и динамическая визуализация траекторий платформы, покрытий датчиков и обнаружения объектов.
Создайте код MATLAB ® сценария и датчиков, а затем внесите программные изменения в сценарий в целях приложения. Можно также импортировать ранее сохраненный сценарий обратно в приложение для дальнейшего моделирования.
Импорт a trackingScenario объект в приложении для визуализации и дальнейшей разработки сценария отслеживания. Ограничения импорта см. в разделе Программное использование trackingScenario объект.
MATLAB Toolstrip: На вкладке Приложения в разделе Обработка сигналов и связь щелкните значок приложения.![]()
командная строка MATLAB: Enter trackingScenarioDesigner.
Для запуска конструктора сценариев отслеживания используйте команду:
trackingScenarioDesigner
Чтобы добавить платформу в приложение, выберите одну платформу (например, башню) на вкладке ПЛАТФОРМА и щелкните Холст платформы, чтобы разместить платформу.
![]()
Изменить свойства платформы можно на вкладке «Свойства платформы». Например, чтобы установить центр платформы в начало координат, установите нулевое значение всех координат исходного положения в поле «Начальная поза».
![]()
Можно также изменить длину, ширину и высоту платформы. По умолчанию Tower смещение платформы в направлении z составляет половину высоты платформы, которая размещает центр башни на ее дне. Если смещение равно нулю, то центр платформы совмещается с геометрическим центром башни.
![]()
Смещение центра определяется как вектор положения от геометрического центра платформы до указанного центра платформы.
В приложении можно также указать неопределенность предполагаемой позы платформы на вкладке Оценка позы. Значение каждого параметра на закладке представляет стандартное отклонение соответствующей величины. Настройка стандартного отклонения полезна для некоторых практических соображений отслеживания. Например, точность датчика, установленного на башне, снижается, если поза башни включает ошибки. Если в приложении стандартные отклонения заданы ненулевыми значениями для платформы с монтажным датчиком, можно наблюдать неточность обнаружений датчиков, связанных с этими стандартными отклонениями.
![]()
Можно также добавить другие платформы в приложение. Добавьте платформу Plane на холсте и установите ее исходное положение как [50, -50, 100]. По умолчанию видно, что центр плоскости (красный) находится в ее геометрическом центре.
![]()
Можно изменить настройки по умолчанию для любого класса (и определить новые классы) с помощью редактора галереи платформ, который можно открыть, щелкнув стрелку раскрывающегося списка на вкладке ПЛАТФОРМА.
![]()
Невозможно изменить класс используемой в настоящее время платформы. Чтобы удалить платформу, выберите платформу из раскрывающегося списка и щелкните значок удаления (корзины).
![]()
Для запуска конструктора сценариев отслеживания используйте команду:
trackingScenarioDesigner
Добавить Plane платформа на холсте платформы и разместите плоскость в [0, 0, 1000], указав ее исходное положение на вкладке Initial Pose как:
![]()
Затем добавьте несколько ППМ на платформу. Щелкните правой кнопкой мыши платформу и выберите «Добавить ППМ» или выберите платформу и выберите «ППМ» на панели инструментов «ТРАЕКТОРИЯ». Затем последовательно щелкните холст, чтобы добавить ППМ. Чтобы завершить действие, на клавиатуре нажмите Enter. Можно перетащить ППМ для изменения траектории. Указанная траектория представляет траекторию центра платформы, определенную на вкладке Смещение центра платформы (Platform Center Offset).
![]()
Если на вкладке ТРАЕКТОРИЯ (TRAJECTORY) для параметров Курс траектории (Trajectory Course) и Ориентация платформы (Platform Orientation) задано значение авто, приложение вычисляет траекторию, подгоняя гладкую кривую, включающую все ППМ, и выравнивая ориентацию платформы с траекторией. Если для параметра «Время» задано значение «Авто», приложение вычисляет продолжительность траектории (время) на основе скорости платформы по умолчанию, которую можно задать с помощью редактора галереи PLATFORM.
![]()
Чтобы отобразить таблицу траекторий ниже, щелкните Таблица траекторий (Trajectory Table). Для отображения графика «Время-высота» нажмите «График времени-высоты».
![]()
После изменения выбора параметра траектории с «Авто» (Auto) на «Таблица» (Table) можно править соответствующую величину в таблице «Траектория» (Trajectory). После редактирования таблицы обратите внимание на изменение траектории.
На графике «Высота над временем» можно перетаскивать точки вверх и вниз по высоте. После установки параметра Время (Time) в значение Таблица (Table) можно перетаскивать точки вперед и назад по времени.
![]()
Чтобы удалить траекторию, выберите траекторию и щелкните Удалить траекторию (Delete Trajectory).
![]()
Файл MAT TSD_Platforms был ранее сохранен с сеансом сценария отслеживания. Чтобы запустить приложение и загрузить файл сеанса, используйте команду:
trackingScenarioDesigner('TSD_Platforms.mat')
Приложение открывает и загружает сценарий. Сценарий содержит две платформы:
Башня высотой 60 метров, расположенная у истоков местной рамы NED.
Цель, движущаяся с курсовой скоростью 750 м/с вокруг башни.
![]()
Затем установите датчик на верхней части башни, чтобы следить за ее окружением. В приложении доступно четыре предопределенных класса датчиков.
![]()
Можно также щелкнуть стрелку раскрывающегося списка, чтобы изменить существующие классы или добавить новые классы датчиков.
В приложении вы выбираете платформу башни, выбираете датчик вращения и размещаете его на верхней части башни. Нажмите кнопку проекции, чтобы включить проекционный вид y-z.
![]()
Датчик по умолчанию расположен в нижней части башни. Чтобы переместить датчик в верхнюю часть башни, измените его монтажное положение и углы.
![]()
Включите обнаружение на отметке, выбрав «Отчет об отметке». Установите в поле зрения датчика значение «Отметка», равное 15 град., чтобы обеспечить широкую зону покрытия на отметке. Установите пределы механического сканирования для параметра «Отметка» на [-15, -5] град.
![]()
Для моделирования сценария слежения и наблюдения за обнаружением цели, генерируемой датчиком, нажмите кнопку Run (Выполнить). (Можно также выбрать «Выполнить без обнаружений».)
![]()
Обнаруживается, что датчик генерирует только одно обнаружение. Вы можете позволить датчику быстрее сканировать и генерировать больше обнаружений, регулируя скорость сканирования с помощью двух параметров:
Частота обновления (Update Rate) - определяет количество срезов поля обзора, проходящих через сенсор в секунду.
Поле обзора (Field of View) - определяет ширину каждого поля обзора датчика или балки.
В приложении увеличьте частоту обновления датчика до 200 Гц. Если для азимутального поля зрения установлено значение 1 град, результирующая скорость сканирования по азимуту составляет 200 град/с, что превышает максимальную скорость сканирования по умолчанию (75 град/с). Увеличьте максимальную скорость сканирования до 300 град/с, чтобы обеспечить высокую скорость сканирования.
Щелкните Выполнить (Run), чтобы снова смоделировать сценарий. Теперь датчик генерирует несколько наборов обнаружений.
![]()
Также можно экспортировать сценарий сценария, щелкнув Экспорт. С помощью экспортированного сценария можно программно изменить сценарий и использовать созданный сценарий для тестирования различных алгоритмов отслеживания. Для получения дополнительной информации об изменении созданного сценария см. Пример конструирования и моделирования сценария отслеживания с помощью конструктора сценариев отслеживания.
Platform Properties - Свойства платформы, включая размеры, позу и RCSЧтобы включить параметры свойств платформы, добавьте в сценарий хотя бы одну платформу. Затем выберите платформу из параметра «Холст платформы» или «Свойства платформы». Значения параметров на вкладке Свойства платформы основаны на выбранной платформе.
| Параметр | Описание |
|---|---|
| Текущая платформа | Выбранная в настоящее время платформа, указанная как список платформ в сценарии. |
| Имя | Имя платформы, указанное как строка. |
| Класс | Класс платформы, указанный как |
Можно изменить параметры по умолчанию (например, скорость) четырех классов платформ и добавить новые классы платформ с помощью редактора галереи платформ. Чтобы открыть редактор, щелкните стрелку раскрывающегося списка на вкладке ПЛАТФОРМА (PLATFORM) и выберите команду Добавить/редактировать галерею платформ (Add/Edit Platform Gallery).
Dimensions - Размеры платформыРазмеры платформы: длина, ширина и высота в метрах.
| Параметр | Описание |
|---|---|
| Длина (м) | Длина платформы, заданная как неотрицательный скаляр в метрах. |
| Ширина (м) | Ширина платформы, заданная как неотрицательный скаляр в метрах. |
| Высота (м) | Высота платформы, заданная как неотрицательный скаляр в метрах. |
Смещение центра платформы можно также задать с помощью смещений X, Y и Z. Смещение измеряется от геометрического центра платформы до указанного центра.
| Параметр | Описание |
|---|---|
| X (м) | Смещение в направлении x, указанное как скаляр в метрах. |
| Y (м) | Смещение в направлении y, указанное как скаляр в метрах. |
| Z (м) | Смещение в направлении z, заданное как скаляр в метрах. |
Initial Pose - Исходное положение и ориентация площадкиИсходное положение и ориентация платформы, определяемые тремя координатами положения X, Y и Altitude в метрах и тремя углами поворота Roll, Pitch и Yaw в градусах.
| Параметр | Описание |
|---|---|
| X (м) | Начальная координата x центра платформы в кадре сценария, заданная как скаляр в метрах. |
| Y (м) | Начальная координата y центра платформы в кадре сценария, заданная как скаляр в метрах. |
| Высота над уровнем моря (м) | Начальная высота центра платформы в кадре сценария, заданная как скаляр в метрах. |
| Крен (°) | Угол ориентации платформы вокруг оси x кадра сценария, заданный как скаляр в градусах. |
| Шаг (°) | Угол ориентации платформы вокруг оси y кадра сценария, заданный как скаляр в градусах. |
| Рыскание (°) | Угол ориентации платформы вокруг оси z кадра сценария, заданный как скаляр в градусах. |
Pose Estimation - Точность оценки позы платформыТочность оценки позы платформы, определяемая как стандартные отклонения для трех углов поворота: крена, тангажа и рыскания, и двух величин поступательного движения: положения и скорости.
Когда значение стандартного отклонения любой величины движения указано как ненулевое, поза платформы содержит ошибки, соответствующие этой величине движения.
| Параметр | Описание |
|---|---|
| Крен (°) | Стандартное отклонение угла крена платформы, определяемое как скаляр в градусах. |
| Шаг (°) | Стандартное отклонение угла тангажа платформы, определяемое как скаляр в градусах. |
| Рыскание (°) | Стандартное отклонение угла рыскания платформы, определяемое как скаляр в градусах. |
| Положение (м) | Стандартное отклонение координат положения платформы, определяемое как скаляр в градусах. |
| Скорость (м) | Стандартное отклонение координат скорости платформы, заданное как скаляр в градусах. |
Radar Cross Section - Информация о сечении РЛСИнформация о поперечном сечении радиолокатора, включая информацию о шаблоне RCS и спецификации RCS Viewer. Можно указать шаблон RCS константы в качестве скаляра в dBsm или импортировать информацию RCS в окне Импорт подписи (Import Signature) после выбора вкладки Импорт RCS (Import RCS).
| Параметр | Описание |
|---|---|
| Шаблон RCS константы | Шаблон RCS, заданный как положительная константа в dBsm. |
| Импорт RCS | Импортировать шаблон RCS через окно Импортировать подпись (Import Signature). |
Можно также задать RCS Viewer, изменив значения параметра «Вырез фасада в градусах» и параметра «Частотный вырез в Гц».
| Параметр | Описание |
|---|---|
| Вырез фасада | Вырез RCS viewer по отметке, заданный как скаляр в градусах. |
| Сокращение частоты | Частотный разрез RCS viewer, заданный как скаляр в Гц. |
Sensor Properties - Свойства датчика, включая установку датчика, настройки сканирования и настройки обнаруженияЧтобы включить параметры Sensor Properties, добавьте по крайней мере один датчик на платформу. Затем выберите датчик на вкладке «Sensor Canvas» или «Sensor Properties». Значения параметров на вкладке Sensor Properties основаны на выбранной платформе и датчике.
| Параметр | Описание |
|---|---|
| Текущая платформа | Текущая платформа, на которой установлен датчик, указанная как список платформ в сценарии. |
| Датчик тока | Выбранный в данный момент датчик, указанный как список датчиков в сценарии. |
| Имя | Имя датчика, указанное как строка. |
| Частота обновления | Частота обновления датчика, заданная как положительный скаляр в Гц. |
| Напечатать | Тип датчика, указанный как:
|
Mounting Location & Angles - Расположение и углы установки датчикаРасположение и углы установки датчика на платформе, определяемые тремя координатами положения X, Y и Z в метрах и тремя углами поворота Rolle, Pitch и Yaw в градусах.
| Параметр | Описание |
|---|---|
| X (м) | координата x датчика на раме платформы, заданная как скаляр в метрах. |
| Y (м) | координата y датчика на раме платформы, заданная как скаляр в метрах. |
| Z (м) | координата z датчика на раме платформы, заданная как скаляр в метрах. |
| Крен (°) | Угол ориентации датчика относительно оси X рамы платформы, заданный как скаляр в градусах. |
| Шаг (°) | Угол ориентации датчика относительно оси y рамы платформы, заданный как скаляр в градусах. |
| Рыскание (°) | Угол ориентации датчика относительно оси z рамы платформы, заданный как скаляр в градусах. |
Scanning & Field of view - Сканирование и поле зрения датчика
| Параметр | Описание |
|---|---|
| Отметка отчета | Включить информацию об отметке датчика, указанную как |
| Режим сканирования | Режим сканирования датчика, выбран как |
| Поле зрения (°) | Поле зрения датчика, определяемое как два неотрицательных скаляра, представляющих азимут и отметку в градусах. |
| Пределы механического сканирования (°) | Верхний и нижний пределы механического сканирования, заданные как два скаляра для Азимута в градусах. Если параметр «Отметка отчета» включен, можно задать пределы сканирования для параметра «Отметка в градусах». Чтобы включить этот параметр, установите режим сканирования в значение |
| Пределы электронного сканирования (°) | Верхний и нижний пределы электронного обзора, определяемые как два скаляра для Азимута в градусах. Если параметр «Отметка отчета» включен, можно задать пределы сканирования для параметра «Отметка в градусах». Чтобы включить этот параметр, установите режим сканирования в значение |
| Максимальная скорость сканирования (°/с) | Максимальная скорость сканирования, заданная как скаляр для азимута в градусах в секунду. Если параметр «Отметка отчета» включен, можно указать максимальную скорость сканирования для параметра «Отметка» в градусах в секунду. Если указанная частота сканирования (Update Rate * Field of View) превышает максимальную частоту сканирования, частота сканирования датчика усекается с максимальной частотой сканирования. Чтобы включить этот параметр, установите режим сканирования в значение |
Detections Settings - Параметры обнаруженияНастройки обнаружения датчика, определяемые с помощью вероятности обнаружения, частоты ложных аварийных сигналов, опорного диапазона и опорного RCS.
| Параметр | Описание |
|---|---|
| Вероятность обнаружения | Вероятность успешного обнаружения датчиком цели, заданной как скаляр в [0,1]. Эта величина определяет вероятность обнаружения цели с сечением РЛС больше опорного RCS и в пределах опорного диапазона датчика. |
| Частота ложных аварийных сигналов | Вероятность ложного обнаружения датчика в каждой ячейке разрешения датчика, указанная как скаляр в [1e-7,1e-3]. |
| Опорный диапазон (м) | Опорный диапазон для заданной вероятности обнаружения и заданного опорного RCS, заданного как положительный скаляр в метрах. |
| Эталонный RCS (dBsm) | Эталонное сечение РЛС (RCS) для заданной вероятности обнаружения и заданного опорного диапазона, заданного как скаляр в дБсм. |
Advanced Settings - Дополнительные настройкиДополнительные настройки датчика перечислены в этой таблице.
| Параметр | Описание |
|---|---|
| Максимальное количество обнаружений | Максимальное число обнаружений, указанное датчиком как положительное целое число. |
| Сообщить о ложной тревоге | Разрешить датчику моделировать и сообщать о ложных аварийных сигналах, указанных как |
| Частота диапазона отчетов | Включить РЛС для измерения и сообщения целевых скоростей дальности, указанных как |
| Окклюзия целевого объекта модели | Включить окклюзию объектов из расширенных объектов, указанных как |
| Неоднозначность модельного ряда | Включить неоднозначность диапазона, указанное как |
| Неоднозначность скорости диапазона модели | Включить неоднозначность скорости передачи, указанное как Чтобы включить этот параметр, установите для параметра «» Частота диапазона отчетов «» значение |
| Максимальный однозначный диапазон (м) | Максимальный однозначный диапазон, заданный как положительный скаляр. Максимальная однозначная дальность определяет максимальную дальность, для которой радар может однозначно разрешить дальность цели. |
| Максимальная однозначная радиальная скорость (м/с) | Максимальная однозначная радиальная скорость, заданная как положительный скаляр. Радиальная скорость - это величина скорости целевого диапазона. Максимальная однозначная радиальная скорость определяет радиальную скорость, для которой радар может однозначно разрешить дальность цели. Чтобы включить этот параметр, установите для параметра «» Частота диапазона отчетов «» значение |
Accuracy & Noise - Настройки точности и шумаТочность и шумовая настройка датчика перечислены в этой таблице.
| Параметр | Описание |
|---|---|
| Азимут (°) | Азимутальное разрешение и смещение, указанные как два неотрицательных скаляра:
|
| Отметка (°) | Разрешение и смещение отметки, указанные как два неотрицательных скаляра:
Чтобы включить этот параметр, включите параметр «Отметка отчета». |
| Дальность (м) | Разрешение диапазона и смещение, указанные как два неотрицательных скаляра:
|
| Дальность (м/с) | Разрешение и смещение скорости диапазона, указанные как два неотрицательных скаляра:
|
| Добавление шума к измерениям | Добавить шум измерения в обнаруженные сигналы, указанные как |
TRAJECTORY - Параметры траекторииДля редактирования траектории и управления ее формированием используйте настройки траектории.

Щелкните ППМ, чтобы добавить ППМ на выбранную платформу.
Щелкните Удалить траекторию (Delete Trajectory), чтобы удалить существующую траекторию.
Щелкните Таблица траектории (Trajectory Table), чтобы отобразить таблицу траектории.
Щелкните График времени и высоты (Time-Altitude plot), чтобы отобразить график времени и высоты.
Можно также выбрать автоматическое формирование траектории ППМ или ввод ППМ вручную путем изменения параметров PATH AND ORIENTATION и SPEED.
| Параметр | Выбор |
|---|---|
| Траекторный курс |
|
| Ориентация платформы |
|
| Время |
|
| Наземная скорость |
|
| Скорость восхождения |
|
Trajectory Table - Информация о траекторииИнформация о траектории для каждого ППМ, заданная как таблица скаляров. При вставке ППМ на холст платформы таблица создается автоматически. Щелкните Таблица траектории (Trajectory Table) на вкладке Траектория (Trajectory), чтобы отобразить таблицу.

После изменения значений параметров в таблице траектория платформы изменяется соответствующим образом на холсте. Таблица содержит эти параметры траектории.
| Параметр | Описание |
|---|---|
| Время (ы) | Время, в течение которого платформа посещает ППМ, указанное как скаляр в секундах. |
| X (м) | координата x ППМ в навигационной рамке сценария. |
| Y (м) | координата y ППМ в навигационном кадре сценария. |
| Высота над уровнем моря (м) | Высота ППМ платформы в навигационном формате сценария. |
| Курс (°) | Направление движения на плоскости x-y, заданное как измерение угла от направления x. |
| Наземная скорость (м/с) | Величина спроецированной скорости на плоскости x-y, заданная как скаляр в метрах. |
| Скорость набора высоты (м/с) | Скорость подъема ППМ, которая является проекцией скорости платформы в направлении z. |
| Крен (°) | Угол ориентации платформы вокруг оси x кадра сценария в градусах, заданный как скаляр. |
| Шаг (°) | Угол ориентации платформы вокруг оси y кадра сценария в градусах, заданный как скаляр. |
| Рыскание (°) | Угол ориентации платформы вокруг оси z кадра сценария в градусах, заданный как скаляр. |
Приложения используют кадр NED в качестве кадра координат по умолчанию, в котором платформа с положительной высотой имеет отрицательную координату z.
Можно отменить (нажмите Ctrl + Z) и повторить (нажмите Ctrl + Y) изменения, внесенные в сценарии и холсты датчиков. Например, эти сочетания клавиш можно использовать для удаления недавно размещенного центра дороги или повторного перемещения радиолокационного датчика.
С помощью панели «Пространство» на клавиатуре можно восстановить вид Холста платформы, содержащий все платформы и траектории.
Для принятия и отмены ППМ можно использовать клавиши Enter и Esc на клавиатуре соответственно.
