fusionRadarSensor объект имитирует обнаружение целей РЛС. Объект можно использовать для моделирования многих свойств реальных радиолокационных датчиков. Например, можно
имитировать реальные обнаружения с добавленным случайным шумом
генерировать ложные аварийные сигналы
имитировать антенны с механическим сканированием и фазированные матрицы с электронным сканированием
задать разрешение и пределы угловой, дальностной и дальностной скорости
Предполагается, что радиолокационный датчик установлен на платформе и переносится платформой при ее маневрировании. Платформа может нести несколько датчиков. При создании датчика задаются положения и ориентации датчика относительно системы координат тела платформы. Каждый вызов для fusionRadarSensor создает датчик. Выходные данные fusionRadarSensor генерирует обнаружение, которое может использоваться в качестве входных данных для многообъектных трекеров, таких как trackerGNNили любые фильтры слежения, такие как trackingKF.
Радиолокационная платформа не ведет никакой информации о радиолокационных датчиках, которые на ней установлены. (Сам датчик содержит свое положение и ориентацию относительно платформы, на которой он установлен, но не какой платформы). Необходимо создать связь между радиолокационными датчиками и платформами. Способ сделать эту связь состоит в том, чтобы поместить платформу и связанные с ней датчики в массив ячеек. При вызове определенного датчика передайте ориентированную на платформу целевую позу и информацию о профиле цели. Датчик преобразует эту информацию в ориентированную на датчик позу. Целевыми позами являются выходы trackingScenario методы.
Можно создать радиолокационный датчик с помощью fusionRadarSensor объект. Задайте свойства радара, используя пары имя-значение, а затем запустите симулятор. Например,
radar1 = fusionRadarSensor( ... 'SensorIndex',1,... 'UpdateRate',10, ... % Hz 'ReferenceRange', 111.0e3, ... % m 'ReferenceRCS', 0.0, ... % dBsm 'FieldOfView',[70,10], ... % [az;el] deg 'HasElevation',false, ... 'HasRangeRate',false, ... 'AzimuthResolution',1.4, ... % deg 'RangeResolution', 135.0) % m
Существует несколько синтаксисов fusionRadarSensor что облегчает определение свойств обычно реализуемых режимов радиолокационного обзора.
sensor = fusionRadarSensor('Rotator') создает fusionRadarSensor объект, который механически сканирует на 360 ° по азимуту. НастройкаHasElevation кому true указывает радиолокационную антенну в сторону центра поля зрения отметки.
sensor = fusionRadarSensor('Sector') создает fusionRadarSensor объект, который механически сканирует сектор азимута 90 °. НастройкаHasElevation кому true, указывает радиолокационную антенну в сторону центра поля зрения отметки. Вы можете изменить ScanMode кому 'Electronic' для электронного сканирования одного и того же сектора азимута. В этом случае антенна механически не наклоняется при сканировании электронного сектора. Вместо этого балки складываются электронным способом для обработки всей высоты, охватываемой пределами сканирования, в одном положении.
sensor = fusionRadarSensor('Raster') возвращает fusionRadarSensor объект, механически сканирующий растровый рисунок, охватывающий 90 ° по азимуту и 10 ° по высоте вверх от горизонта. Вы можете изменить ScanMode свойство для 'Electronic' для выполнения электронного растрового сканирования в том же объеме.
sensor = fusionRadarSensor('No scanning') возвращает fusionRadarSensor объект, который смотрит вдоль направления визирования антенны РЛС. Механическое или электронное сканирование не выполняется.
При использовании этих синтаксисов можно задать другие свойства радара. Например,
sensor = fusionRadarSensor(1,'Raster','ScanMode','Electronic')
Свойства, характерные для fusionRadarSensor здесь перечислены объекты. Для получения более подробной информации введите
help fusionRadarSensor
Параметры расположения датчика.
Расположение датчика
SensorIndex | Уникальный идентификатор каждого датчика. |
UpdateRate | Скорость, с которой генерируются обновления датчика, заданная как положительный скаляр. Обратное значение этого свойства должно быть целым числом, кратным интервалу времени моделирования. Обновления, запрашиваемые между интервалами обновления датчика, не возвращают обнаруженные ошибки. |
MountingLocation | Датчик (x, y, z), определяющий смещение начала координат датчика от начала координат его платформы. Значение по умолчанию позиционирует начало координат датчика в начале координат платформы. |
MountingAngles | Углы рыскания, наклона и крена монтажной рамы датчика относительно рамы платформы. |
DetectionCoordinates | Указывает систему координат для обнаружений, отображаемых в выходных данных обнаружений
|
Параметры чувствительности.
Параметры чувствительности
DetectionProbability | Вероятность обнаружения цели с радиолокационным сечением, |
FalseAlarmRate | Вероятность ложного обнаружения в каждой ячейке разрешения радара. Ячейки разрешения определяются по |
ReferenceRange | Дальность, на которой находится цель с радиолокационным сечением, |
ReferenceRCS | Сечение РЛС цели в дБ, при котором цель обнаруживается на дальности, заданной |
Разрешение датчика и параметры смещения.
Параметры разрешения
AzimuthResolution | Азимутальное разрешение РЛС определяет минимальное разделение по азимутальному углу, при котором РЛС может различать две цели. |
ElevationResolution | Разрешающая способность РЛС по высоте определяет минимальное разделение по углу места, при котором РЛС может различать две цели. Это свойство применяется только в том случае, если |
RangeResolution | Разрешение дальности РЛС определяет минимальное разделение в дальности, при котором РЛС может различать две цели. |
RangeRateResolution | Разрешение дальности РЛС определяет минимальное разделение по дальности, при котором РЛС может различать две цели. Это свойство применяется только в том случае, если |
AzimuthBiasFraction | Это свойство определяет составляющую азимутального смещения РЛС как долю азимутального разрешения РЛС, указанного |
ElevationBiasFraction | Это свойство определяет компонент смещения по высоте РЛС как часть разрешения по высоте РЛС, определяемого |
RangeBiasFraction | Это свойство определяет компонент смещения дальности РЛС как долю разрешения дальности РЛС, определяемого |
RangeRateBiasFraction | Это свойство определяет составляющую смещения скорости дальности РЛС как долю разрешения дальности РЛС, определяемой |
Включение параметров.
Включение параметров
HasElevation | Это свойство позволяет радиолокационному датчику сканировать отметку и оценивать отметку по обнаруженным целям. |
HasRangeRate | Это свойство позволяет радиолокационному датчику оценивать дальность. |
HasFalseAlarms | Это свойство позволяет радиолокационному датчику генерировать ложные сообщения об обнаружении аварийных сигналов. |
HasRangeAmbiguities | Если true, радар не разрешает неоднозначности дальности. Когда радиолокационный датчик не может разрешить неоднозначность дальности, цели на дальностях за пределами |
HasRangeRateAmbiguites | Если значение равно true, радар не разрешает неоднозначности скорости дальности. Когда радиолокационный датчик не может разрешить неоднозначность дальности, цели на дальностях выше |
HasNoise | Указывает, добавляется ли шум к измерениям датчика. Установить для этого свойства значение |
HasOcclusion | Включить окклюзию из расширенных объектов, указанных как true или false. Установить для этого свойства значение true для моделирования окклюзии из расширенных объектов. Обратите внимание, что как расширенные объекты, так и точечные цели могут быть перекрыты расширенными объектами, но точечный объект не может перекрывать другой точечный объект или расширенный объект. Установить для этого свойства значение false для отключения окклюзии расширенных объектов. |
HasINS | Установите для этого свойства значение true, чтобы включить дополнительный входной аргумент для передачи текущей оценки позы платформы датчика датчику. Эта информация о позе добавляется в |
Параметры диапазона и скорости диапазона.
Параметры диапазона и скорости диапазона
MaxUnambiguousRange | Это свойство определяет дальность, на которой радар может однозначно разрешить дальность цели. Цели, обнаруженные на дальностях за пределами однозначного диапазона, переносятся в интервал дальности Это свойство также определяет максимальный диапазон, в котором генерируются ложные аварийные сигналы. Это свойство применяется только к ложным обнаружениям целевых объектов при установке |
MaxUnambiguousRadialSpeed | Это свойство определяет максимальное значение величины радиальной скорости, с которой радар может однозначно разрешить дальность цели. Цели, обнаруженные на дальностях, величина которых больше максимальной однозначной радиальной скорости, переносятся в интервал дальностей Это свойство также определяет интервал скорости диапазона, в течение которого генерируются ложные целевые обнаружения. Это свойство применяется только к ложным обнаружениям целевых объектов при установке обоих параметров |
Каждый датчик, созданный fusionRadarSensor принимает в качестве входных данных массив целевых структур. Эта структура служит интерфейсом между trackingScenario и датчики. Вы создаете цель struct из целевых поз и профильной информации, полученной trackingScenario или аналогичное программное обеспечение.
Структура содержит эти поля.
| Область | Описание |
|---|---|
PlatformID | Уникальный идентификатор платформы, указанный как положительное целое число. Это обязательное поле без значения по умолчанию. |
ClassID | Определяемое пользователем целое число, используемое для классификации типа целевого объекта, указанного как неотрицательное целое число. |
Position | Положение цели в координатах платформы, определяемое как действительный вектор 1 на 3. Это обязательное поле без значения по умолчанию. Единицы в метрах. |
Velocity | Скорость цели в координатах платформы, заданная как действительный вектор 1 на 3. Единицы измерения в метрах в секунду. Значение по умолчанию: |
Acceleration | Ускорение цели в координатах платформы, задаваемое в виде вектора ряда 1 на 3. Единицы в метрах в секунду-квадрат. Значение по умолчанию: |
Orientation | Ориентация цели относительно координат платформы, заданная как скалярный кватернион или матрица вращения 3 на 3. Ориентация определяет поворот рамы от системы координат платформы к текущей системе координат целевого тела. Единицы измерения безразмерны. Значение по умолчанию: |
AngularVelocity | Угловая скорость цели в координатах платформы, заданная как действительный вектор 1 на 3. Величина вектора определяет угловую скорость. Направление определяет ось вращения по часовой стрелке. Единицы измерения в градусах в секунду. Значение по умолчанию: |
Можно создать целевую структуру позы путем объединения информации из информации платформы, выводимой из targetProfiles способ trackingScenario и информация о целевой позе, выводимая из targetPoses СПОСОБ НА ПЛАТФОРМЕ, НЕСУЩЕЙ ДАТЧИКИ. Их можно объединить, извлекая для каждого PlatformID в целевом массиве поз, информация о профиле в массиве профилей платформы для того же самого PlatformID.
Платформа targetPoses возвращает эту структуру для каждого целевого объекта, отличного от платформы.
Целевые позы
platformID |
ClassID |
Position |
Velocity |
Yaw |
Pitch |
Roll |
AngularVelocity |
platformProfiles возвращает эту структуру для всех платформ в сценарии.
Профили платформы
PlatformID |
ClassID |
RCSPattern |
RCSAzimuthAngles |
RCSElevationAngles |
Обнаружения состоят из измерений положений и скоростей целей и их ковариационных матриц. Детекции строятся относительно координат датчика, но могут выводиться в одной из нескольких координат. Несколько координатных кадров используются для представления положений и ориентаций различных платформ и датчиков в сценарии.
При радиолокационном моделировании всегда существует глобальная система координат верхнего уровня, которая обычно является декартовой системой координат «север-восток-вниз» (NED), определяемой касательной плоскостью в любой точке поверхности Земли. trackingScenario объект моделирует движение платформ в глобальной системе координат. При создании платформы указывается ее расположение и ориентация относительно глобального каркаса. Эти величины определяют оси корпуса платформы. Каждый радиолокационный датчик установлен на корпусе платформы. При создании датчика необходимо указать его местоположение и ориентацию относительно координат тела платформы. Эти величины определяют оси датчиков. Оси тела и радара могут меняться с течением времени, однако глобальные оси не меняются.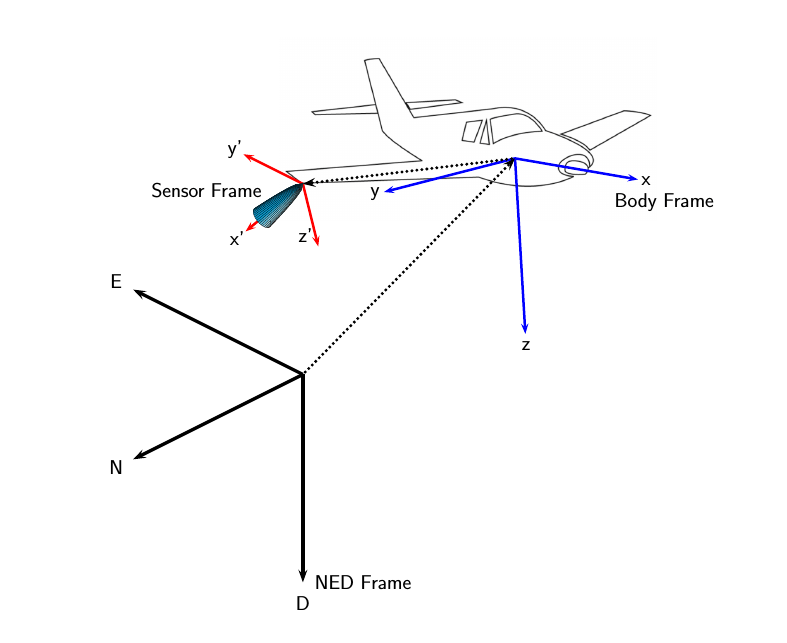
Могут потребоваться дополнительные рамки координат. Например, часто дорожки не поддерживаются в координатах NED (или ENU), так как этот кадр координат изменяется в зависимости от широты и долготы, где он определен. Для сценариев, которые охватывают большие площади (более 100 километров в каждом измерении), земно-центрированный земной каркас (ECEF) может быть более подходящей глобальной рамкой для использования.
Радиолокационный датчик формирует измерения в сферических координатах относительно его сенсорного кадра. Однако местоположение объектов в радиолокационном сценарии поддерживается в кадре верхнего уровня. Радиолокационный датчик установлен на платформе и по умолчанию должен знать только его положение и ориентацию относительно платформы, на которой он установлен. Другими словами, радар ожидает, что все целевые объекты будут сообщаться относительно осей корпуса платформы. РЛС сообщает о необходимых преобразованиях (положении и ориентации) для привязки сообщаемых обнаружений к осям корпуса платформы. Эти преобразования используются потребителями радиолокационных детекторов (например, трекеров) для поддержания трасс в осях кузова платформы. Поддержание гусениц в осях корпуса платформы обеспечивает слияние измерительной или путевой информации между несколькими датчиками, установленными на одной платформе.
Если платформа оснащена датчиком ИНС, то можно определить местоположение и ориентацию платформы относительно кадра верхнего уровня. Эта информация INS может использоваться РЛС для привязки всех обнаружений к координатам сценария.
При указании HasINS как true, вы должны пройти в INS struct в step способ. Эта структура состоит из положения, скорости и ориентации платформы в координатах сценария. Эти параметры позволяют выражать позиции цели в координатах сценария путем установки DetectionCoordinates собственность.
Детекции радиолокационных датчиков возвращаются в виде матрицы ячеек objectDetection объекты. Обнаружение содержит эти свойства.
objectDetection Структура
| Область | Определение |
|---|---|
Time | Время измерения |
Measurement | Измерения |
MeasurementNoise | Ковариационная матрица шума измерения |
SensorIndex | Уникальный идентификатор датчика |
ObjectClassID | Классификация объектов |
MeasurementParameters | Параметры, используемые функциями инициализации любых нелинейных фильтров слежения Калмана |
ObjectAttributes | Дополнительная информация передана трекеру |
Measurement и MeasurementNoise в системе координат, указанной DetectionCoordinates имущества fusionRadarSensor сообщаются в декартовых координатах датчика.
Координаты измерений
| DetectionCoordinates | Координаты измерения и шума | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
'Scenario' |
Зависимость координат от
| |||||||||||||||
'Body' | ||||||||||||||||
'Sensor rectangular' | ||||||||||||||||
'Sensor spherical' |
Зависимость координат от HasRiveRate и HasElevation
|
MeasurementParameters поле состоит из массива structs, описывающие последовательность преобразований координат из дочернего кадра в родительский кадр или обратные преобразования (см. Поворот кадра). Наиболее длительная последовательность преобразований: Sensor → Platform → Scription. Например, если об обнаружениях сообщается в сферических координатах датчика и HasINS устанавливается в значение false, то последовательность состоит из одного преобразования из датчика в платформу. Если HasINS верно, последовательность преобразований состоит из двух преобразований - сначала в координаты платформы, затем в координаты сценария. Тривиально, если об обнаружениях сообщается в прямоугольных координатах платформы и HasINS имеет значение false, преобразование состоит только из идентификатора.
Каждый struct принимает вид:
MeasurementParameters
| Параметр | Определение |
|---|---|
Frame | Перечисляемый тип, указывающий кадр, используемый для отчета об измерениях. Когда о обнаружениях сообщается с помощью прямоугольной системы координат, |
OriginPosition | Смещение положения начала кадра (k) от начала кадра (k + 1), представленного в виде вектора 3 на 1. |
OriginVelocity | Смещение скорости начала кадра (k) от начала кадра (k + 1), представленного в виде вектора 3 на 1. |
Orientation | Матрица вращения ортонормированного кадра с действительными значениями 3 на 3, которая вращает оси кадра (k + 1) для выравнивания с осями кадра (k). |
IsParentToChild | Логический скаляр, указывающий, если |
HasElevation | Логический скаляр, указывающий, имеет ли кадр трехмерное положение. Только значение false для первого |
HasVelocity | Логический скаляр, указывающий, включают ли сообщаемые обнаружения измерения скорости. |
ObjectAttributes
| Признак | Определение |
|---|---|
TargetIndex | Идентификатор платформы, |
SNR | Определение отношения сигнал/шум в дБ. |
