Перед выполнением этой задачи необходимо иметь
Импортированные данные в приложение System Identification. См. раздел Импорт данных временной области в приложение. Поддерживаемые форматы данных см. в разделе Данные, поддерживаемые моделями процессов.
Выполнение всех необходимых операций предварительной обработки данных. Если требуется моделировать ненулевые смещения, например, когда модель содержит поведение интеграции, не уменьшайте данные. В других случаях для повышения точности модели необходимо уменьшить количество данных. См. Способы подготовки данных для идентификации системы.
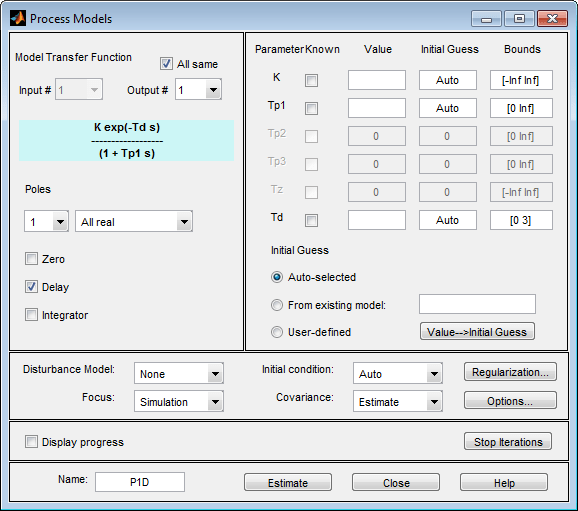
В приложении Идентификация системы выберите Оценка > Модели процессов, чтобы открыть диалоговое окно Модели процессов.
Для получения дополнительных сведений о параметрах в диалоговом окне нажмите кнопку «Справка».
Если модель содержит несколько входов или несколько выходов, можно указать, следует ли оценивать одну и ту же передаточную функцию для всех пар «вход-выход» или для каждой другой передаточной функции. Выберите входной и выходной каналы в полях Input и Output. Поля появляются только при наличии нескольких входов или выходов. Дополнительные сведения см. в разделе Оценка моделей процессов с несколькими входами и несколькими выходами.
В области Функция переноса модели (Model Transfer Function) укажите структуру модели, используя следующие опции.
В разделе «Полюса» выберите количество полюсов, а затем выберите All real или Underdamped.
Примечание
Вам нужно по крайней мере два полюса, чтобы разрешить недампированные мод (комплексно-сопряженная пара).
Установите флажок Ноль (Zero), чтобы включить нуль, который является числительным элементом, отличным от константы, или снимите флажок, чтобы исключить ноль.
Установите флажок Задержка (Delay), чтобы включить задержку, или снимите флажок, чтобы исключить задержку.
Установите флажок Интегратор (Integrator), чтобы включить интегратор (саморегулирующийся процесс), или снимите флажок, чтобы исключить интегратор.
В области Параметр (Parameter) отображается столько активных параметров, сколько включено в структуру модели.
Примечание
По умолчанию для параметра Имя модели (model Name) задано сокращение, отражающее структуру модели, как описано в разделе Спецификация структуры модели процесса (Process Model Structure Specification).
В области «Начальное предположение» выберите Auto-selected для вычисления начальных значений параметров для оценки. Отображается столбец Начальное предположение (Initial Guess) в таблице Параметр (Parameter). Auto. Если у вас нет хорошего предположения для значений параметра, Auto работает лучше, чем ввод значения ad hoc.
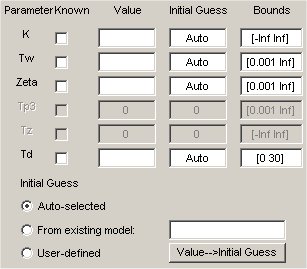
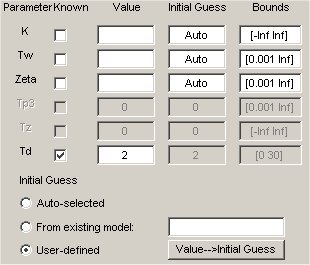
(Необязательно) Если приблизительно известно значение параметра, введите это значение в столбце «Начальное приближение» таблицы «Параметры» и нажмите клавишу Enter. Алгоритм оценки использует это значение в качестве начальной точки. Если значение параметра точно известно, введите это значение в столбце «Начальное приближение» и нажмите клавишу Enter. Установите соответствующий флажок Известно в таблице, чтобы зафиксировать его значение.
Если известен диапазон возможных значений для параметра, введите эти значения в соответствующее поле Bounds, чтобы помочь алгоритму оценки. После указания значений нажмите клавишу Enter.
Например, на следующем рисунке показано, что значение задержки Td фиксируется при 2 s и не оценивается.
В раскрывающемся списке Модель возмущения выберите одну из доступных опций. Дополнительные сведения о каждой опции см. в разделе Структура модели возмущения для моделей процесса.
В раскрывающемся списке Фокус (Focus) выберите способ взвешивания относительной важности посадки на различных частотах. Дополнительные сведения о каждой опции см. в разделе Назначение оценочных весов.
В раскрывающемся списке Начальное условие (Initial condition) укажите способ обработки начальных состояний алгоритмом. Дополнительные сведения о доступных опциях см. в разделе Определение начальных условий для алгоритмов итеративной оценки.
Совет
При неправильной посадке можно попытаться задать конкретный метод обработки начальных состояний, а не выбирать его автоматически.
В раскрывающемся списке «Ковариация» выберите Estimate если требуется, чтобы алгоритм вычислял неопределенности параметров. Влияние таких неопределенностей отображается на графиках как области достоверности модели.
Чтобы пропустить оценку неопределенности, выберите None. Пропуск вычисления неопределенности может сократить время вычисления для сложных моделей и больших наборов данных.
В поле Имя модели (Model Name) измените имя модели или сохраните значение по умолчанию. Имя модели должно быть уникальным в плате моделей.
Чтобы просмотреть ход выполнения оценки, установите флажок Показать ход выполнения (Display Progress). Откроется окно просмотра хода выполнения, в котором сообщается о ходе выполнения оценки.
Щелкните Регуляризация (Regularization), чтобы получить регуляризованные оценки параметров модели. Укажите константы регуляризации в диалоговом окне Опции регуляризации (Regularization Options). Дополнительные сведения см. в разделе Регуляризованные оценки параметров модели.
Щелкните Оценить (Estimate), чтобы добавить эту модель на плату моделей в приложении Идентификация системы (System Identification).
Чтобы остановить поиск и сохранить результаты после завершения текущей итерации, щелкните Остановить итерации (Stop Iterations). Чтобы продолжить итерации из текущей модели, нажмите кнопку Продолжить (Continue), чтобы назначить значения текущих параметров в качестве начальных предположений для следующего поиска.
Можно указать, как алгоритм оценки взвешивает подгонку на различных частотах. В приложении установите для фокуса один из следующих параметров:
Prediction - Использует инверсию шумовой модели H для взвешивания относительной важности того, насколько близко подгоняются данные в различных частотных диапазонах. Соответствует минимизации предсказания на один шаг вперед, что обычно благоприятствует подгонке в течение короткого временного интервала. Оптимизирована для приложений прогнозирования выходных данных.
Simulation - использует входной спектр для взвешивания относительной важности посадки в определенном диапазоне частот. Не использует шумовую модель для взвешивания относительной важности того, насколько близко подходят данные в различных частотных диапазонах. Оптимизирована для приложений моделирования выходных данных.
Stability - Ведет себя так же, как Prediction опция, но также заставляет модель быть стабильной. Дополнительные сведения о стабильности модели см. в разделе Нестабильные модели.
Filter - укажите пользовательский фильтр, чтобы открыть диалоговое окно Фокус оценки (Estimation Focus), в котором можно ввести фильтр, как описано в разделе Простой фильтр полосы пропускания (Simple Passband Filter) или Определение пользовательского фильтра (Defining a Custom Filter). Эта предварительная фильтрация применяется только для оценки динамики от входа к выходу. Модель возмущения определяется на основе оценочных данных.
Проверьте модель, установив соответствующий флажок в области Представления модели (Model Views) приложения Идентификация системы (System Identification). Дополнительные сведения о проверке моделей см. в разделе Проверка моделей после оценки.
Уточните модель, нажав кнопку Значение - > Начальное приближение, чтобы назначить текущие значения параметров в качестве начальных предположений для следующего поиска, отредактируйте поле Имя (Name) и нажмите кнопку Оценка (Estimate).
Экспортируйте модель в рабочую область MATLAB ® для дальнейшего анализа, перетащив ее в прямоугольник В рабочую область (To Workspace) в приложении Идентификация системы (System Identification).
