Оцените, что 2-й ограничивающий прямоугольник при закрытых дверях создает использующий 3D ограничивающий прямоугольник в раме лидара
bboxesCamera = bboxLidarToCamera(bboxesLidar,intrinsics,tform)bboxesLidar. Функция использует внутренние параметры камеры intrinsics и матрица преобразования лидара в камеру tform.
bboxesCamera = bboxLidarToCamera(bboxesLidar,intrinsics,tform,L)L. L - соответствующее маркированное 2-D изображение 2-D ограничивающих рамок, где объекты помечены отчетливо.
[ указывает, для какой из указанных 3-D ограничивающих рамок функция обнаруживает соответствующую 2-D ограничивающую рамку в кадре камеры.bboxesCamera,boxesUsed] = bboxLidarToCamera(___)
[___] = bboxLidarToCamera(___,'ProjectedCuboid',true) возвращает 3-D спроецированные кубоиды вместо 2-D ограничивающих прямоугольников.
Загрузите данные истинности грунта из файла MAT в рабочую область. Извлеките изображение, данные облака точек и внутренние параметры камеры из данных истинности земли.
dataPath = fullfile(toolboxdir('lidar'),'lidardata','lcc','bboxGT.mat'); gt = load(dataPath); im = gt.im; pc = gt.pc; intrinsics = gt.cameraParams;
Извлеките матрицу преобразования лидара в камеру из данных истинности земли.
tform = gt.camToLidar.invert;
Извлеките информацию о ограничивающей рамке 3-D.
bboxLidar = gt.cuboid1;
Оцените 2-D ограничивающую рамку на изображении.
bboxesCamera = bboxLidarToCamera(bboxLidar,intrinsics,tform);
Отображение ограничивающей рамки 3-D, наложенной на облако точек.
pcshow(pc.Location,pc.Location(:,1))
showShape('cuboid',bboxLidar)
Отображение ограничивающей рамки 2-D, наложенной на изображение.
J = undistortImage(im,intrinsics); annotatedImage = insertObjectAnnotation(J,'Rectangle',bboxesCamera,'Vehicle'); imshow(annotatedImage)

Загрузите данные истинности грунта из файла MAT в рабочую область. Извлеките изображение, данные облака точек и внутренние параметры камеры из данных истинности земли.
dataPath = fullfile(toolboxdir('lidar'),'lidardata','lcc','bboxGT.mat'); gt = load(dataPath); im = gt.im; pc = gt.pc; intrinsics = gt.cameraParams;
Извлеките матрицу преобразования лидара в камеру из данных истинности земли.
tform = gt.camToLidar.invert;
Извлеките информацию о ограничивающей рамке 3-D.
bboxLidar = gt.cuboid2;
Оцените спроецированную ограничительную рамку 3-D на изображении.
bboxesCamera = bboxLidarToCamera(bboxLidar,intrinsics,tform,... 'ProjectedCuboid',true);
Отображение ограничивающей рамки 3-D, наложенной на облако точек.
figure
pcshow(pc.Location,pc.Location(:,1))
showShape('cuboid',bboxLidar)
Отображение 3-D спроецированной ограничивающей рамки, наложенной на изображение.
J = undistortImage(im,intrinsics); h = imshow(J); pcH = vision.roi.ProjectedCuboid; pcH.Parent = h.Parent; pcH.Position = bboxesCamera;

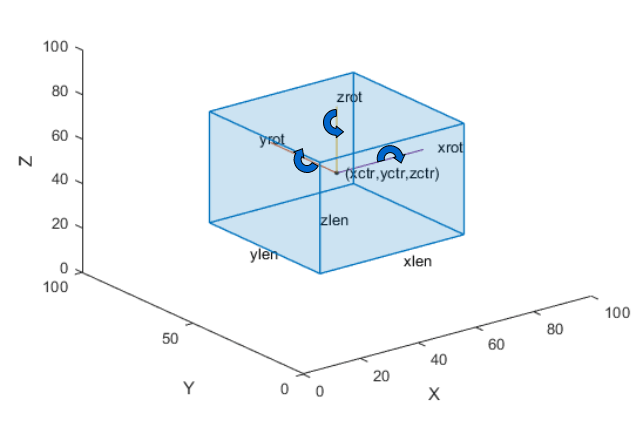
bboxesLidar - 3-D ограничивающие рамки в кадре лидараcuboidModel object | N-by-9 матрица вещественных значений3-D ограничивающие рамки в кадре лидара, указанные как cuboidModel объект или N-by-9 матрица вещественных значений. N - число 3-D ограничивающих прямоугольников. Каждая строка матрицы имеет форму [xctr
yctr zctr xlen ylen
zlen xrot
yrot zrot].
xctr, yctr и zctr - эти значения определяют координаты оси X, Y и Z, соответственно, центра кубовидной ограничивающей рамки.
xlen, ylen и zlen - эти значения определяют длину кубоида по осям x, y и z соответственно перед его поворотом.
xrot, yrot и zrot - эти значения определяют углы поворота кубоида вокруг осей x, y и z соответственно. Эти углы являются положительными по часовой стрелке, если смотреть в прямом направлении соответствующих осей.
На этом рисунке показано, как эти значения определяют положение кубоида.
Примечание
Функция предполагает, что данные облака точек, соответствующие 3-D ограничивающим рамкам, и данные изображения синхронизированы по времени.
Типы данных: single | double
intrinsics - Внутренние параметры камерыcameraIntrinsics объектВнутренние параметры камеры, указанные как cameraIntrinsics объект.
tform - Камера для жесткого преобразования лидараrigid3d объектЖесткое преобразование камеры в лидар, указанное как rigid3d объект.
L - Маркированное 2-D изображениеПомеченное 2-D изображение, указанное как матрица вещественных значений. Размер матрицы совпадает с размером матрицы ImageSize имущество intrinsics.
Примечание
Предполагается, что помеченные изображения не искажены.
Типы данных: single | double | int8 | int16 | uint8 | uint16
