Интерактивная оценка жесткого преобразования между лидарным датчиком и камерой
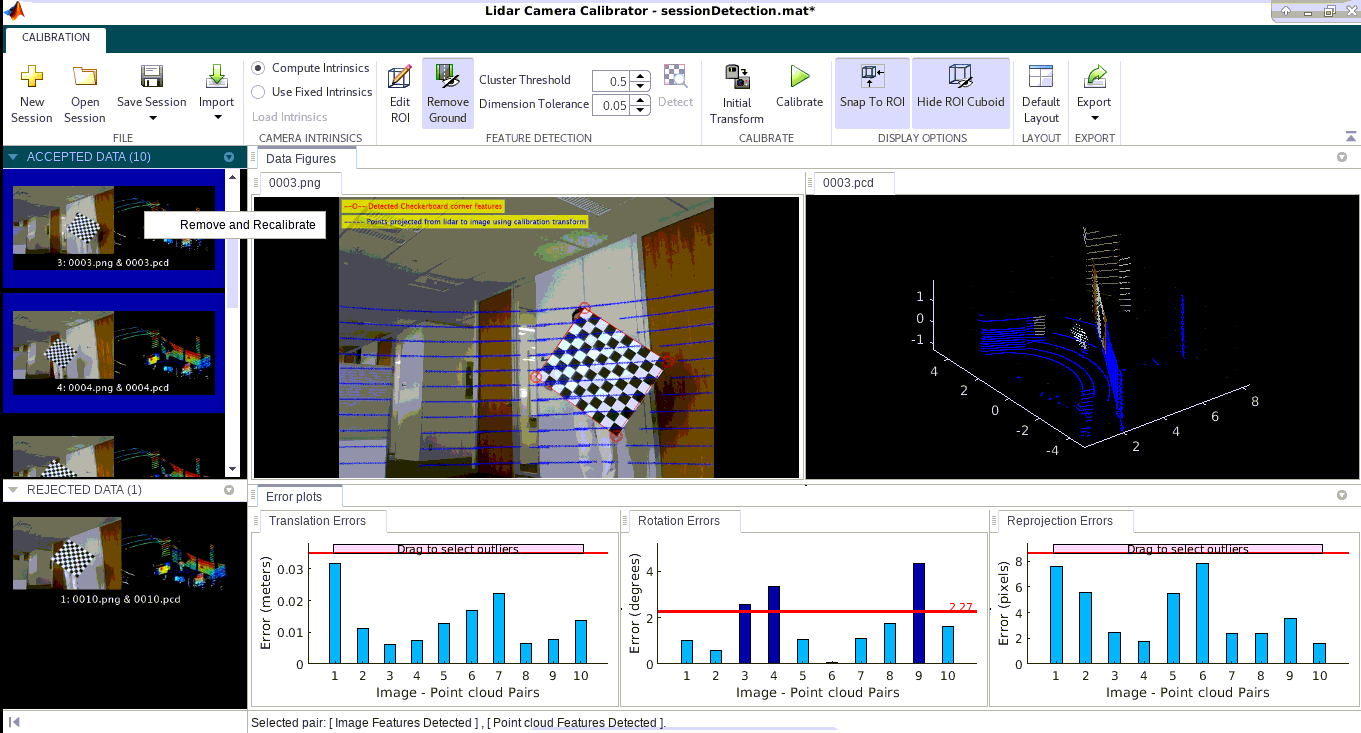
Приложение Lidar Camera Calibrator позволяет в интерактивном режиме оценивать жесткое преобразование между датчиком лидара и камерой. Приложение выполняет калибровку, считывая калибровочные изображения и облака точек, захваченные пользователем. Приложение считывает данные облака точек в форматах PLY и PCAP и изображения в любом формате, поддерживаемом imformats.
С помощью приложения можно:
Обнаружение, извлечение и визуализация элементов шахматной доски из изображения и данных облака точек.
Оцените жесткое преобразование между камерой и лидаром, используя результаты обнаружения элементов.
Результаты калибровки используются для предохранения данных обоих датчиков. Можно визуализировать данные облака точек, спроецированные на изображения, а также информацию о цвете или градациях серого из изображений, объединенных с данными облака точек.
Просмотрите показанные на графике метрики ошибок калибровки. Можно удалить отклонения, используя пороговую строку, и перекалибровать оставшиеся данные.
Определите интересующую область (ROI) вокруг шахматной доски, чтобы уменьшить вычислительные ресурсы, необходимые для процесса оценки преобразования.
Экспорт данных метрики преобразования и ошибки в виде переменных рабочей области или файлов MAT. Можно также создать сценарий MATLAB ® для всего рабочего процесса.
MATLAB Toolstrip: На вкладке Приложения в разделе Обработка изображений и компьютерное зрение щелкните значок приложения.
командная строка MATLAB: Enter lidarCameraCalibrator.
