Приложение Lidar Labeler позволяет в интерактивном режиме маркировать данные истинности земли в облаке точек или последовательности облаков точек и создавать соответствующие данные истинности земли.
В этом примере демонстрируются возможности приложения Lidar Labeler в рабочем процессе маркировки достоверных данных lidar.
Используйте приложение Lidar Labeler для интерактивной маркировки файлов облаков точек и последовательностей файлов облаков точек.
Чтобы открыть приложение Lidar Labeler, в командной строке MATLAB ® введите эту команду.
lidarLabeler
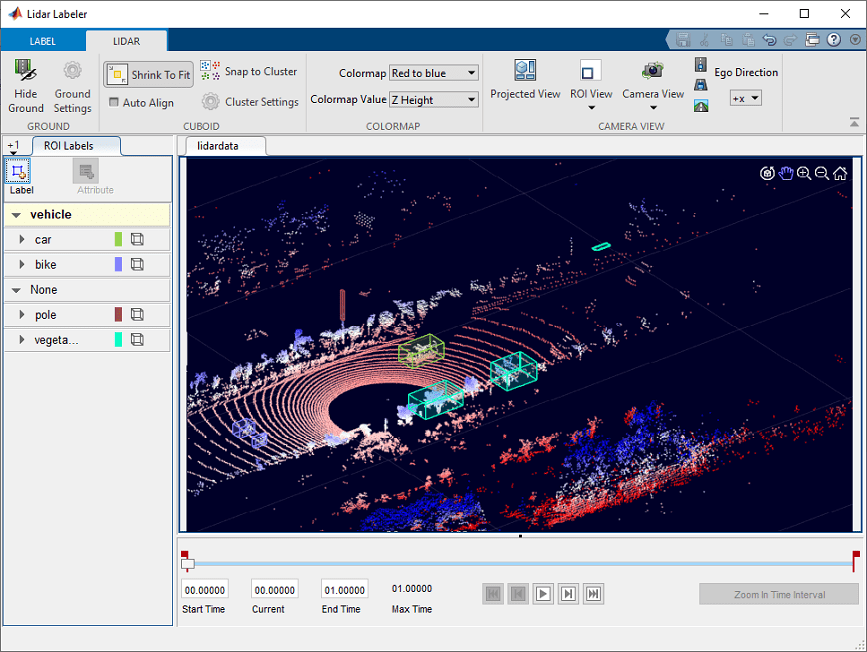
Приложение откроется в пустой сессии.
Можно также открыть приложение на вкладке «Приложения» в разделе «Обработка изображений» и «Компьютерное зрение».
Приложение Lidar Labeler позволяет загружать сигналы из нескольких типов источников данных. В приложении источником данных является файл или папка, содержащие один или несколько сигналов для маркировки. Этот процесс используется для загрузки данных для последовательности облаков точек.
На панели инструментов приложения щелкните Импорт > Добавить облако точек. Откроется окно «Выбор облака точек» с параметром «Тип источника», для которого уже установлено значение Point Cloud Sequence.
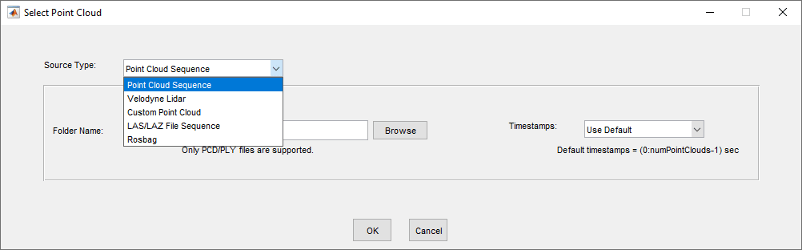
В параметре «Имя папки» перейдите к папке, содержащей последовательность файлов данных облака точек (PCD), которые требуется загрузить, и нажмите «Выбрать папку».
Если в рабочей области MATLAB имеется переменная временных меток, задайте для параметра Временные метки значение From Workspace и, в Import From Workspace выберите переменную и нажмите кнопку OK. В противном случае установите для нее значение Use Default.
В окне Выбрать облако точек нажмите кнопку ОК. Последовательность облаков точек загружается в приложение.
После загрузки данных облака точек в приложение Lidar Labeler создайте определения меток и атрибуты. Определения меток содержат информацию о метках, которыми требуется аннотировать точки. Определения меток можно создавать в интерактивном режиме в приложении или программно с помощью labelDefinitionCreatorLidar объект.
Метка ROI - это метка, соответствующая интересующей области (ROI).
На вкладке Метки окупаемости инвестиций в левой панели щелкните Метка.
Создать Cuboid и укажите имя метки.

От Group список, выберите New Group и укажите имя группы. Добавление меток в группы является необязательным.
Указанное имя группы отображается на вкладке «Метки окупаемости инвестиций» с указанным под ней именем метки.
Дополнительные сведения об этих метках см. в разделе Метки и атрибуты окупаемости инвестиций.
Атрибут ROI указывает дополнительную информацию о метке ROI. Для этих типов можно определить атрибуты окупаемости инвестиций.
Numeric Value - укажите числовой скалярный атрибут, например, количество дверей на маркированном транспортном средстве.
String - укажите строковый скалярный атрибут, например цвет транспортного средства.
Logical - укажите логический атрибут true или false, например, находится ли транспортное средство в движении.
List - укажите атрибут раскрывающегося списка предопределенных строк, таких как марка или модель транспортного средства.
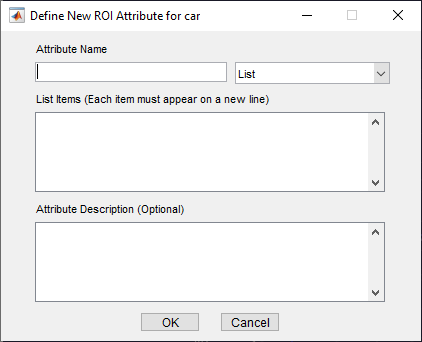
Этот процесс используется для создания атрибута.
На вкладке Метки окупаемости инвестиций (ROI Labels) на левой панели выберите метку и щелкните Атрибут (Attribute).
Укажите имя в поле Наименование атрибута (Attribute Name). Выберите тип атрибута и нажмите кнопку ОК.
Дополнительные сведения об этих атрибутах см. в разделе Метки и атрибуты окупаемости инвестиций.
Метка сцены определяет дополнительную информацию по сцене. Метки сцен используются для описания таких условий, как освещение и погода, или событий, таких как изменение полосы движения.
Этот процесс используется для создания определения метки сцены.
Выберите вкладку Метки сцены в левой области приложения и щелкните Определить новую метку сцены.
В окне Определить новую метку сцены (Define new scene label) укажите имя метки.
Выберите цвет для метки.
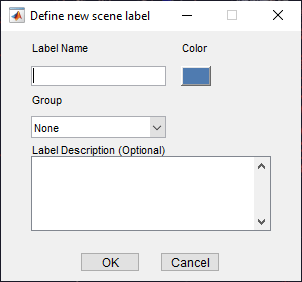
От Group список, выберите New Group и укажите имя группы. Добавление меток в группы является необязательным.
На панели «Метки сцены» отображается определение метки сцены.
Алгоритм автоматизации можно использовать для автоматической маркировки данных с помощью одного из включенных алгоритмов или путем создания и импорта пользовательского алгоритма автоматизации. Дополнительные сведения о создании пользовательского алгоритма автоматизации см. в разделе Создание алгоритма автоматизации для маркировки. Приложение включает в себя алгоритмы автоматизации маркировки Lidar Object Tracker и Temporal Interpolator облака точек.
Этот процесс используется для маркировки данных облака точек с помощью алгоритма автоматизации.
Загрузите данные в приложение и создайте определение метки окупаемости инвестиций.
На вкладке LABEL панели инструментов приложения в разделе Automate Labeling щелкните Select Algorithm.
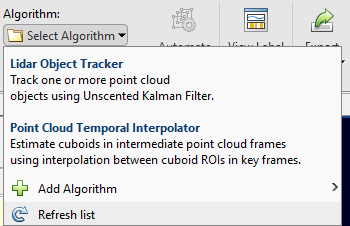
Выберите алгоритм автоматизации.
Щелкните Автоматизировать и следуйте инструкциям по автоматизации на правой панели приложения.
После создания меток для данных облака точек приложение предоставляет возможности просмотра, корректировки и сравнения данных облака точек и меток.
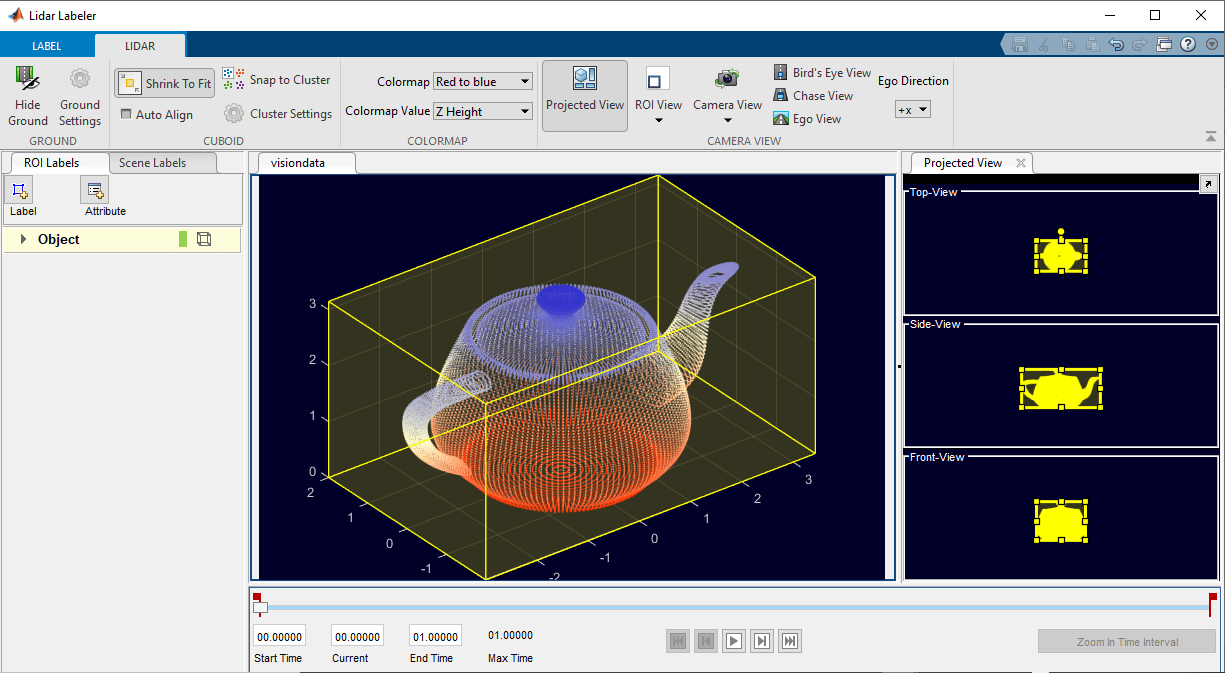
На вкладке LIDAR панели инструментов приложения щелкните Проекционный вид, чтобы одновременно просмотреть выбранную метку спереди, сверху и сбоку. Эти виды используются для настройки точности меток вручную.
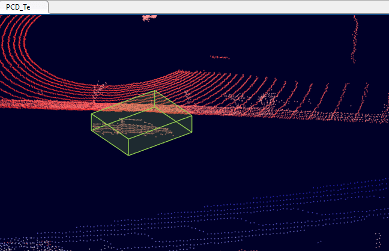
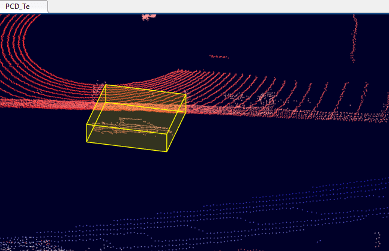
Включите параметр «Автоматическое выравнивание», чтобы поместить кубоид в данные метки и выровнять метку в направлении объекта. На этом рисунке показаны различия в метке с включенным параметром «Автоматическое выравнивание» и без него.
| Метка без параметра «Автоматическое выравнивание» | Параметр «Метка с автоматическим выравниванием» |
|
|
|
Опция «Вид камеры» используется для сохранения и повторного использования пользовательских видов данных облака точек. Можно поворачивать, панорамировать и зумировать вид, а затем сохранить вид, щелкнув Вид камеры (Camera View) и выбрав Сохранить вид камеры (Save Camera View). Укажите имя вида и нажмите кнопку «ОК». Можно в любое время вернуться к сохраненному виду, щелкнув «Вид камеры» и выбрав сохраненный вид из раскрывающегося списка.

Можно определить и просмотреть интересующую область (ROI) в облаке точек с помощью представления ROI, а затем выбрать Select ROI.
Приложение открывает Adjust ROI Limits , которое содержит параметры окупаемости инвестиций.
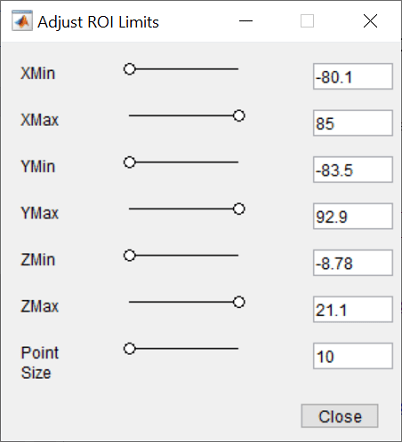
Чтобы задать пределы осей X, Y и Z для ROI, перетащите соответствующие ползунки минимального и максимального значений. Можно также ввести новые минимальные или максимальные значения в соответствующие текстовые поля. Можно также настроить отображаемый размер облака точек с помощью параметра «Размер точки». Это позволяет улучшить визуализацию разреженных облаков точек путем увеличения их размера. Если требуется вернуться к полному виду облака точек, щелкните «ROI View» и выберите «Полный вид».
Подключите к приложению внешний инструмент для отображения синхронизированных по времени изображений для использования в качестве ссылки при создании меток. См. раздел lidar.syncImageViewer.SyncImageViewer класс. В следующем примере показано, как подключить внешний дисплей к Lidar Labeler.
Подключение дисплея изображения к Lidar Labeler
Подключите инструмент отображения изображения к приложению Lidar Labeler. Используйте приложение и инструмент для отображения синхронизированных данных лидара и изображения.
Укажите имя данных лидара для загрузки в приложение.
sourceName = fullfile('lidarSequence');
Подключите дисплей к приложению и просмотрите синхронизированные данные.
lidarLabeler(sourceName,'SyncImageViewerTargetHandle',@helperSyncImageDisplay);


На вкладке LABEL панели инструментов приложения выберите Экспорт меток > В рабочую область. В окне Экспорт в рабочую область оставьте имя переменной экспорта по умолчанию. gTruthи нажмите кнопку OK. Приложение экспортирует groundTruthLidargTruth, в рабочую область MATLAB. Этот объект содержит данные метки lidar, полученные из сеанса приложения.
Свойства groundTruthLidar объект, gTruth, содержат информацию об источнике данных сигнала, определениях меток и метках из связанного сеанса приложения. Отображение информации об объекте и его свойствах с помощью этих команд.
gTruth - Отображение свойств groundTruthLidar объект.
gTruth.DataSource - Отображение информации об источнике данных облака точек.
gTruth.LabelDefinitions - Отображение таблицы информации об определениях меток.
gTruth.LabelData - Отображение данных ROI и метки сцены.