Маркировка данных истинности земли в облаках лидарных точек
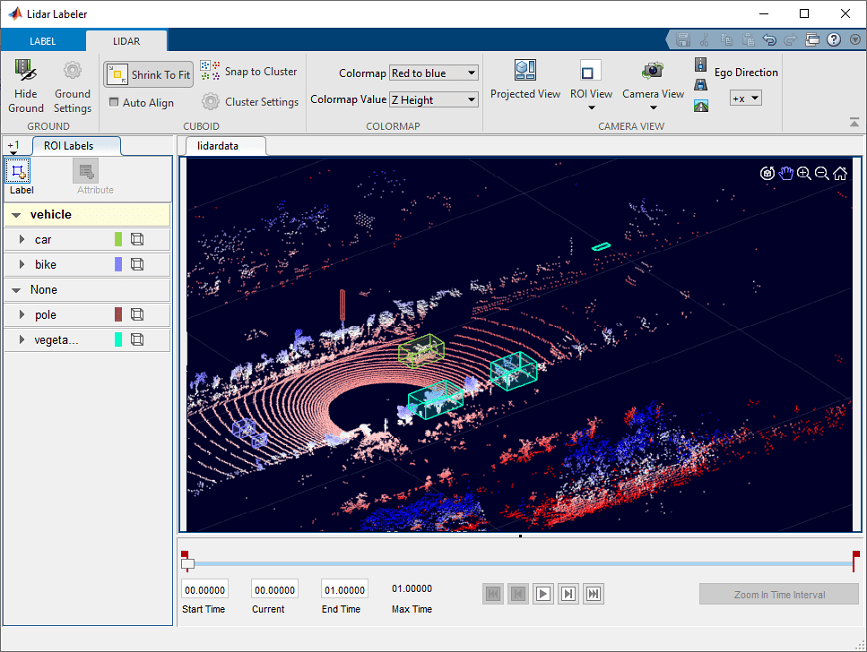
Приложение Lidar Labeler позволяет маркировать объекты в облаке точек или последовательности облаков точек. Приложение считывает данные облака точек из файлов PLY, PCAP, LAS, LAZ, ROS и PCD. С помощью приложения можно:
Определите метки интересующей области кубоида (ROI) и метки сцены. Используйте их для интерактивной маркировки исходных данных.
Определите атрибуты меток и используйте их для получения дополнительной информации о метках.
Используйте встроенные алгоритмы для кластеризации, сегментации нулевой плоскости, автоматической маркировки и отслеживания.
Сохранение определений меток, данных облака точек и данных об истинности земли в файле сеанса для дальнейшего использования.
Параметр «Проекционный вид» используется для одновременного просмотра меток на видах сверху, спереди и сбоку.
Параметр «Вид камеры» используется для создания и повторного использования пользовательских видов данных облака точек.
Используйте параметр «Автоматическое выравнивание», чтобы повернуть и наилучшим образом подогнать кубоид к кластеру.
Используйте lidar.syncImageViewer.SyncImageViewer для синхронизации приложения с внешним средством визуализации или анализа.
Запись, импорт и использование пользовательского алгоритма автоматизации для автоматической маркировки.
Оцените производительность алгоритмов автоматизации этикеток с помощью визуальной сводки.
Экспортировать помеченную истину основания как groundTruthLidar объект. Этот объект может использоваться для проверки системы и обучения детектора объекта.
Дополнительные сведения об этом приложении см. в разделе Начало работы с Lidar Labeler.
MATLAB ® Toolstrip: На вкладке Приложения в разделе Обработка изображений и компьютерное видение щелкните значок приложения.
командная строка MATLAB: Enter lidarLabeler.
Метки не поддерживают суббнаки.
Окно Сводка меток (Label Summary) не поддерживает суббнаки.
В левой части окна «Метки окупаемости инвестиций» содержатся определения меток окупаемости инвестиций, которые можно пометить на кадрах облака точек. Определения меток можно создавать непосредственно на этой панели. Можно также создать определения меток программным путем с помощью labelDefinitionCreatorLidar и затем импортировать эти определения меток в сеанс приложения.
Приложение поддерживает определение меток и атрибутов окупаемости инвестиций.
Метка ROI - это метка, которая соответствует ROI в сигнальном кадре. В этой таблице описывается поддерживаемый тип метки.
| Метка окупаемости инвестиций | Описание | Пример |
|---|---|---|
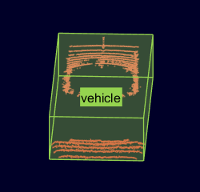
Cuboid | Нарисуйте вокруг объектов кубоидальные метки ROI. |
|
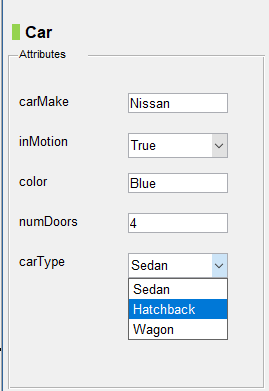
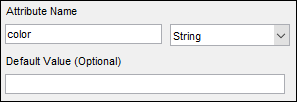
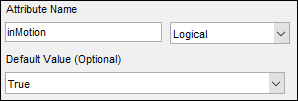
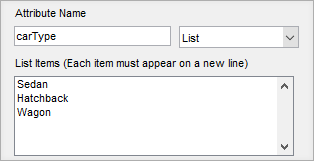
Атрибут ROI указывает дополнительную информацию о метке ROI. Например, в сцене вождения атрибуты могут включать тип или цвет транспортного средства. В этой таблице описываются поддерживаемые типы атрибутов.
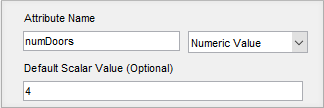
| Тип атрибута | Образец определения атрибута | Примеры значений по умолчанию |
|---|---|---|
|
|
|
|
| |
|
| |
|
|
Используйте lidar.syncImageViewer.SyncImageViewer для создания инструмента просмотра изображения, соответствующего данным облака точек.
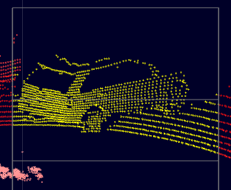
Удалите плоскость основания, чтобы четко просмотреть созданные метки объектов.
Параметры поворота, перемещения, развертывания и сжатия используются для редактирования кубоидов после их рисования.
Опция «Вид камеры» используется для сохранения вида данных из текущего угла и направления.
Чтобы избежать необходимости повторно маркировать истину земли новыми метками, организуйте схему маркировки, которую вы хотите использовать, прежде чем вы начнете маркировать истину земли.
Можно копировать и вставлять метки между сигналами одного типа.