Данные метки истинности основания Lidar
groundTruthLidar содержит информацию о метках истинности основания лидара. Источник данных, используемый для создания объекта, представляет собой коллекцию данных облака точек лидара. Можно создавать, экспортировать или импортировать groundTruthLidar из приложения Lidar Labeler.
Экспорт groundTruthLidar в приложении Lidar Labeler на панели инструментов приложения выберите «Экспорт» > «В рабочую область». Приложение экспортирует объект в рабочую область MATLAB ®. Создание groundTruthLidar программно использовать groundTruthLidar функция (описана здесь).
gTruth = groundTruthLidar(dataSource,labelDefs,labelData)
dataSource указывает источник данных облака точек лидара и задает DataSource собственность.
labelDefs определяет определения интересующей области (ROI) и меток сцены, содержащих такую информацию, как Name, Type, и Groupи устанавливает LabelDefinitions собственность.
labelData определяет идентифицирующую информацию, положение и временные метки для помеченных меток окупаемости инвестиций и меток сцены, а также устанавливает LabelData собственность.
DataSource - Источник данных lidar об истинности землиPointCloudSequenceSource объект | VelodyneLidarSource объект | LasFileSequenceSource объект | RosbagSource объектИсточник данных lidar истинности земли, указанный как PointCloudSequenceSource, VelodyneLidarSource, LasFileSequenceSource, или RosbagSource объект. Этот объект содержит информацию, описывающую источник, из которого были помечены основные данные lidar. В этой таблице представлены дополнительные сведения о типе объектов, которые можно указать.
| Имя объекта | Источник данных | Ссылка на класс |
|---|---|---|
PointCloudSequenceSource | Папка последовательности облаков точек | vision.labeler.loading.PointCloudSequenceSource |
VelodyneLidarSource | Файл захвата пакетов Velodine ® (PCAP) | vision.labeler.loading.VelodyneLidarSource |
LasFileSequenceSource | Папка последовательности файлов LAS или LAZ | lidar.labeler.loading.LasFileSequenceSource |
RosbagSource | Файл Росбаг | lidar.labeler.loading.RosbagSource |
LabelDefinitions - Определения метокЭто свойство доступно только для чтения.
Определения меток, указанные как таблица. Чтобы создать эту таблицу, используйте один из этих параметров.
В приложении Lidar Labeler создайте определения меток, а затем экспортируйте их как часть groundTruthLidar объект.
Использовать labelDefinitionCreatorLidar для создания таблицы определений меток. При сохранении этой таблицы в MAT-файл можно загрузить определения меток в сеанс приложения Lidar Labeler, выбрав команду «Открыть» > «Определения меток» на панели инструментов приложения.
Создайте таблицу определений меток в командной строке MATLAB.
В этой таблице описываются требуемые и необязательные столбцы таблицы, указанные в LabelDefinitions собственность.
| Колонка | Описание | Обязательно или необязательно | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
Name | Строки или векторы символов, задающие имя каждого определения метки. | Необходимый | ||||||||
Type |
| Необходимый | ||||||||
LabelColor | Триплеты RGB, определяющие цвета определений меток. Значения находятся в диапазоне [0, 1]. Желтый цвет (триплет RGB [1 1 0]) зарезервирован для цвета выбранных меток в приложении Lidar Labeler. | Дополнительный При определении меток в приложении Lidar Labeler необходимо указать цвет. Поэтому экспортированная таблица определений меток всегда содержит этот столбец. При создании определений меток с помощью | ||||||||
Group | Строки или векторы символов, определяющие группу, к которой принадлежит каждое определение метки. | Дополнительный При создании таблицы определений меток в командной строке MATLAB нет необходимости включать Если вы экспортируете определения меток из приложения Lidar Labeler или создаете их с помощью | ||||||||
Description | Строки или векторы символов, описывающие каждое определение метки. | Дополнительный При создании таблицы определений меток в командной строке MATLAB нет необходимости включать Если вы экспортируете определения меток из приложения Lidar Labeler или создаете их с помощью | ||||||||
Hierarchy | Структуры, содержащие информацию об атрибутах для каждого определения метки.
Если определение метки не содержит атрибутов, то запись таблицы для этого определения метки пуста. | Дополнительный При определении суббнаков или атрибутов в приложении Lidar Labeler или |
LabelData - данные метки для каждой окупаемости инвестиций и метки сцены;Это свойство доступно только для чтения.
Данные метки для каждого ROI и метки сцены, указанные как timetable. Каждый столбец LabelData содержит метки для одного определения метки и соответствует Name значение для каждой строки в LabelDefinitions. Формат хранения данных метки зависит от типа метки.
| Тип метки | Формат хранения для меток на каждой отметке времени |
|---|---|
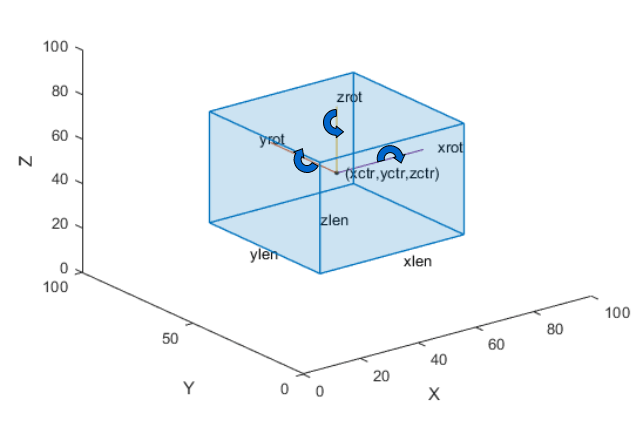
|
На рисунке показано, как эти значения определяют положение кубоида.
|
labelType.Scene | Логический вектор, где |
Если Cuboid Данные метки ROI включают атрибуты, затем метки на каждой временной метке должны быть указаны как структуры. Структура включает эти поля.
| Поле структуры метки | Описание |
|---|---|
Position | Позиции родительских меток на данной отметке времени Формат |
AttributeName1,...,AttributeNameN | Атрибуты родительских меток Каждый определенный атрибут имеет собственное поле, где имя поля соответствует имени атрибута. Значение атрибута является символьным вектором для |
changeFilePaths | Изменение путей к файлам в данных истинности земли |
selectLabels | Выберите истинные данные земли по имени или типу метки |
selectLabelsByGroup | Выбор данных истинности земли по имени группы меток |
selectLabelsByName | Выберите истинные данные земли по имени метки |
selectLabelsByType | Выбор данных истинности земли по типу метки |