Полевое ориентированное управление (ВОК), также известное как векторное управление, - это метод, используемый для управления синхронным двигателем постоянного магнита (PMSM) и асинхронными двигателями переменного тока (ACIM). ВОК обеспечивает хорошую возможность управления полным диапазоном крутящего момента и частоты вращения. Реализация ВОК требует преобразования токов статора из стационарной системы отсчета в систему отсчета потока ротора (также известную как система отсчета d-q).
Регулирование скорости и крутящего момента являются наиболее часто используемыми режимами управления ВОК. Режим управления положением встречается реже. В большинстве областей применения тяги используется режим регулирования крутящего момента, в котором система управления двигателем следует за эталонным значением крутящего момента. В режиме управления скоростью контроллер двигателя следит за эталонным значением скорости и генерирует эталонный крутящий момент для управления крутящим моментом, который формирует внутреннюю подсистему. В режиме управления положением регулятор скорости формирует внутреннюю подсистему.
Реализация алгоритма ВОК требует обратной связи токов и положения ротора в реальном времени. Измерьте ток и положение с помощью датчиков. Можно также использовать безсенсорные методы, использующие расчетные значения обратной связи вместо фактических измерений на основе датчиков.
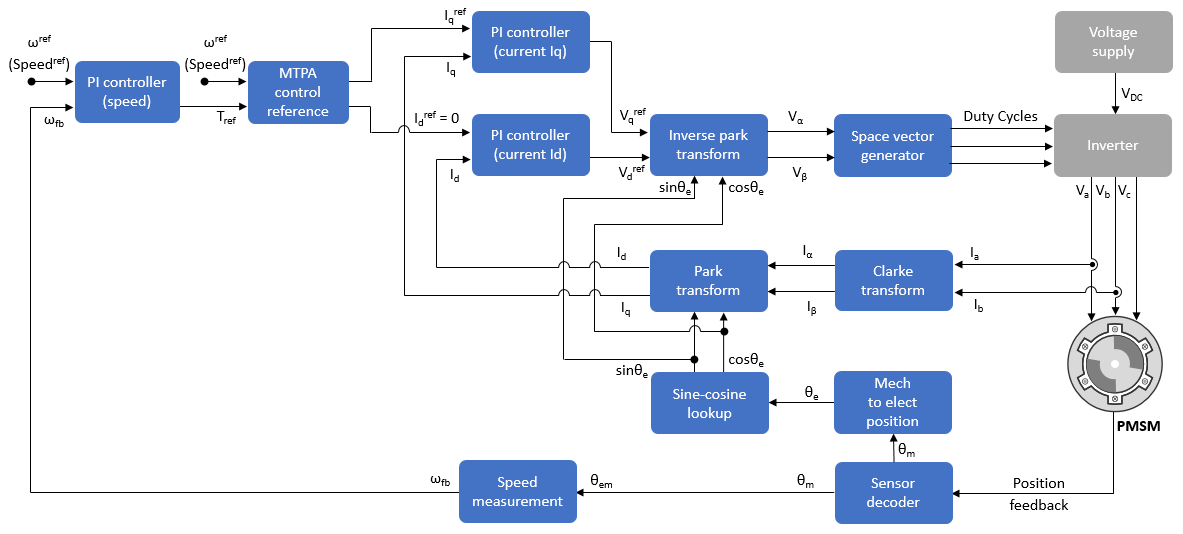
На этом рисунке показана архитектура ВОК для PMSM. Подробный набор уравнений и допущений, которые Blockset™ управления двигателем использует для реализации ВОК PMSM, см. в разделе Математическая модель PMSM.
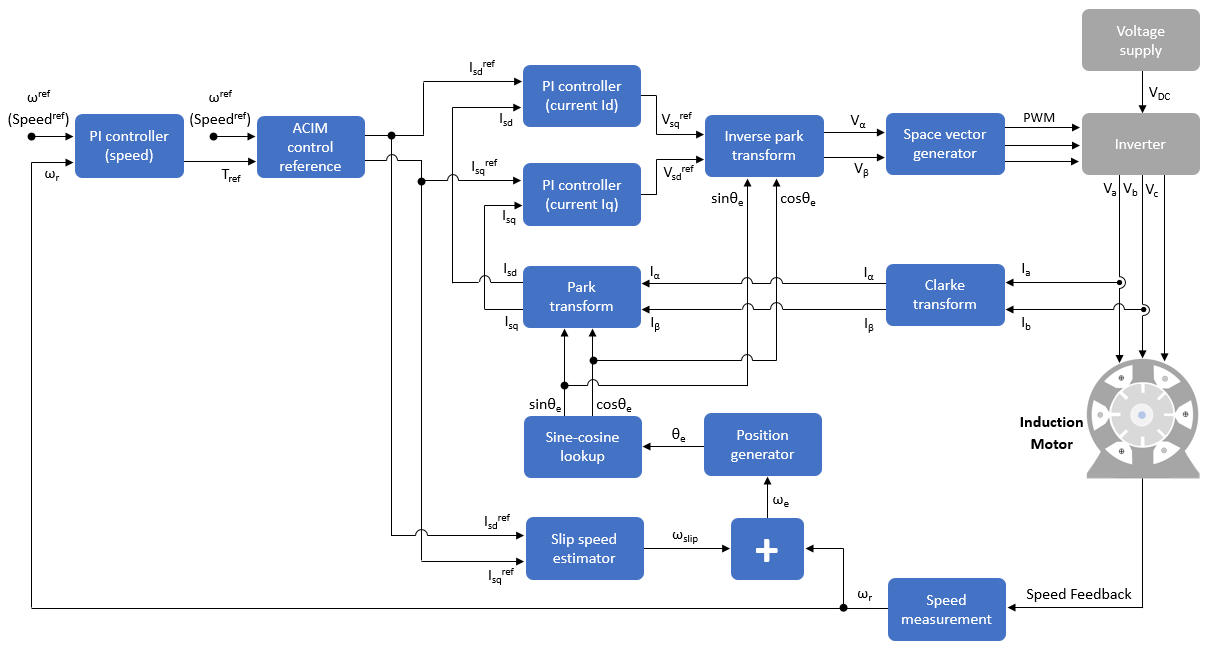
На этом рисунке показана архитектура ВОК для асинхронного двигателя переменного тока (ACIM). Подробный набор уравнений и допущений, которые блок управления двигателем использует для реализации ВОК асинхронного двигателя, см. в разделе Математическая модель асинхронного двигателя.