Формирование последовательности переключения для шестиступенчатой коммутации бесщеточного двигателя постоянного тока (BLDC)
Блок управления двигателем/элементы управления/ссылка на элемент управления
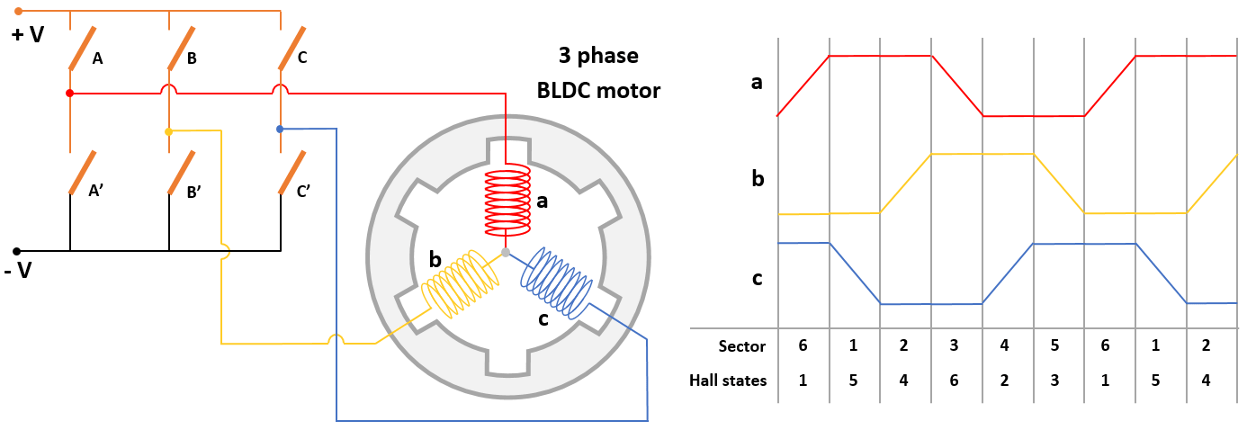
Шестиступенчатый коммутационный блок использует 120-градусный режим проводимости для генерации последовательности переключения для реализации шестиступенчатой коммутации (или трапециевидной коммутации) на трехфазном BLDC-двигателе. Сигналы переключения можно использовать для управления переключателями и токами статора и, следовательно, для управления скоростью и направлением вращения двигателя.
Блок принимает порядковый номер Холла или положение ротора (от датчика положения, такого как датчик Холла или квадратурного кодера) и направление крутящего момента в качестве входных сигналов. Для определения сектора, в котором присутствует ротор, используется последовательность Холла или ввод положения. Блок вычисляет последовательность переключения так, что он возбуждает соответствующие фазы для поддержания угла крутящего момента (угол между осью d ротора и магнитным полем статора) 90 градусов (с отклонением 30 градусов).
На этом рисунке показан пример фазоров магнитного поля статора вместе с последовательностью Холла по умолчанию.
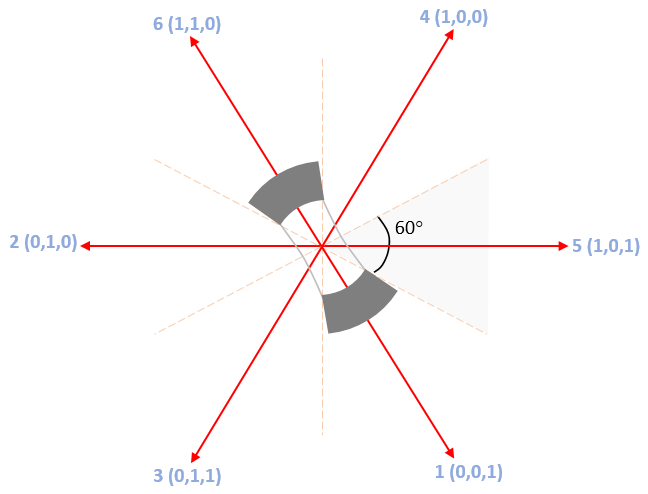
Блок использует логику коммутации на основе последовательности Холла для генерации последовательностей коммутации.
| Холл Стейт (Холл а, Холл б, Холл с) | Последовательность переключения (AA 'BB' CC ') | ||
|---|---|---|---|
| AA' | BB' | Копия | |
| 5 (101) | 00 | 10 | 01 |
| 4 (100) | 01 | 10 | 00 |
| 6 (110) | 01 | 00 | 10 |
| 2 (010) | 00 | 01 | 10 |
| 3 (011) | 10 | 01 | 00 |
| 1 (001) | 10 | 00 | 01 |
На этом рисунке показаны фазоры магнитного поля статора вместе с возможными секторами (определяемыми по положению входного ротора).
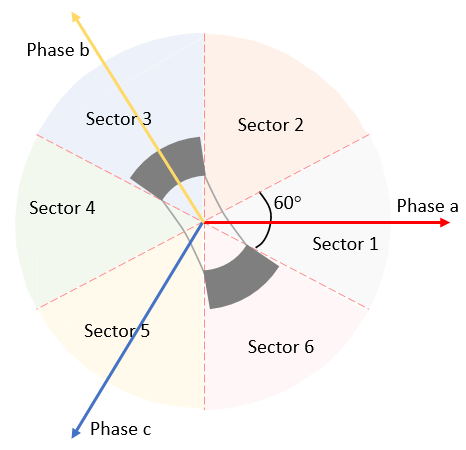
Блок использует логику коммутации, основанную на сигналах датчика положения, для генерации последовательностей переключения.
| Положение (start) | Сектор | Последовательность переключения (AA 'BB' CC ') | ||
|---|---|---|---|---|
| AA' | BB' | Копия | ||
| (-30°, 30°] | 1 | 00 | 10 | 01 |
| (30°, 90°] | 2 | 01 | 10 | 00 |
| (90°, 150°] | 3 | 01 | 00 | 10 |
| (150°, 210°] | 4 | 00 | 01 | 10 |
| (210°, 270°] | 5 | 10 | 01 | 00 |
| (270°, 330°] | 6 | 10 | 00 | 01 |
Дискретный контроллер PI с защитой от обмотки и сбросом | Механическое в электрическое положение

