В примере модели mcb_pmsm_foc_simконфигурирование текущего контроллера и контроллера скорости является двумя важными задачами. Текущий контроллер планируется запустить после каждого Ts (50 мксек для 20 частота переключения кГц) и контроллер скорости работает после каждого Ts_speed (10* Ts). Контроллер тока считывает фазовые токи и положение двигателя и вычисляет рабочий цикл ШИМ для запуска двигателя. Контроллер скорости запускает контур управления, вычисляет эталон Iq для текущего контроллера и управляет скоростью двигателя в замкнутом контуре.
В целевых аппаратных средствах текущий контроллер синхронизируется с прерыванием АЦП (для каждого Ts) и контроллер скорости запускается после каждого Ts_speed (10* Ts).
На этом рисунке показана последовательность событий, триггер прерывания и время выполнения программного обеспечения для алгоритма управления, выполняемого на целевом оборудовании.
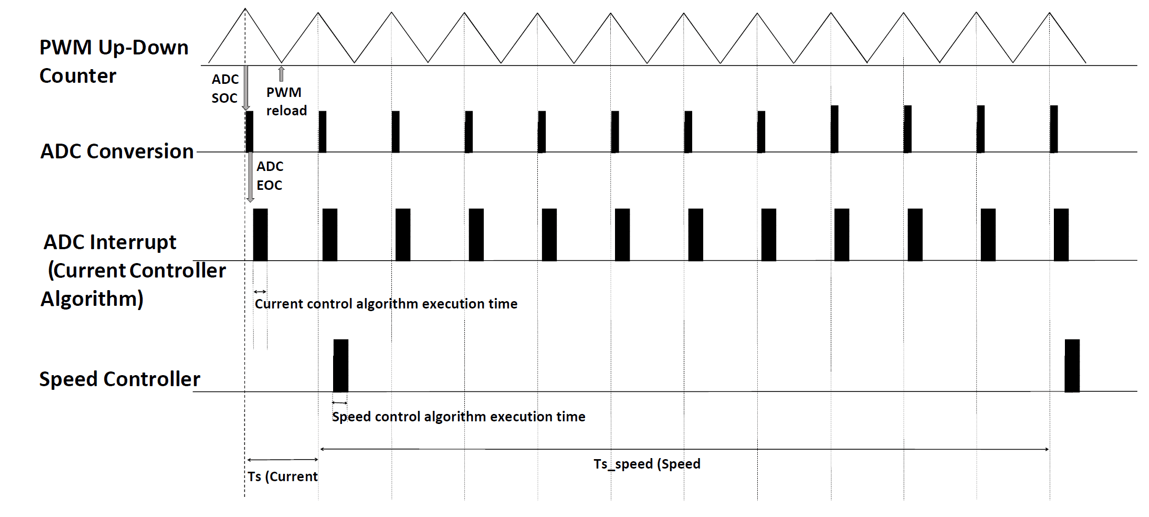
На этом рисунке время выполнения для текущего контроллера и контроллера скорости не в масштабе. Для лучшего понимания функциональных возможностей периферийных устройств процессора, таких как АЦП (аналого-цифровой преобразователь) и ШИМ (широтно-импульсная модуляция), см. техническое описание процессора.
В модели используется следующая последовательность событий:
Периферийное устройство ШИМ процессора, которое выровнено по центру (счетчик с понижением частоты), инициирует событие начала преобразования (SOC) для модуля АЦП, когда значение счетчика ШИМ равно периоду ШИМ.
Модуль АЦП преобразует дискретизированный аналоговый сигнал в цифровые счетчики и инициирует событие окончания преобразования (EOC).
EOC инициирует прерывание ADC.
Текущий контроллер планируется выполнить с прерыванием АЦП.
Контроллер скорости должен работать после каждого Ts_speed.
Можно также использовать Blockset™ SoC для планирования задач, профилирования и решения проблем, связанных с синхронизацией ADC-PWM, ответом контроллера и изучением различных настроек PWM. Дополнительные сведения см. в разделе Интеграция планирования MCU и периферийных устройств в приложении управления двигателем.
