Выполните следующие действия для выбора целевого оборудования в конфигурации модели.
В модели Simulink ® щелкните Оборудование > Настройки оборудования, чтобы открыть диалоговое окно Параметры конфигурации.
Откройте вкладку Hardware Implementation и установите для Hardware board значение TI Delfino F28379D LaunchPad.
Для любой другой пользовательской платы перейдите на вкладку Hardware Implementation диалогового окна Configuration Parameters и выберите соответствующий процессор и отредактируйте сведения о периферийных устройствах в разделе Hardware board settings > Target hardware resources.
Подробные сведения о конфигурации интерфейса решателя и квадратурного кодера см. в разделе Параметры конфигурации модели.
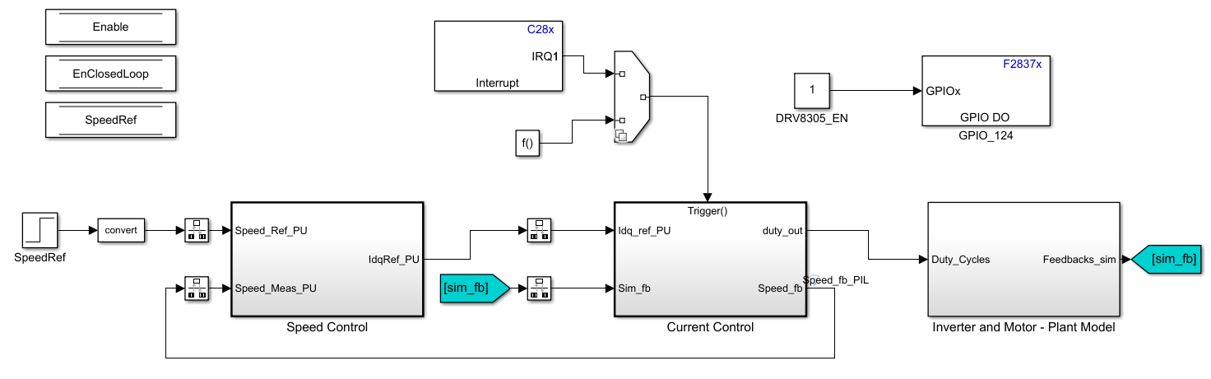
Подключите плату Texas Instruments™ BOOSTXL-DRV8305 и разъем QEP к аппаратной плате Texas Instruments LaunchPad XL. Подробные сведения об аппаратном подключении, связанном с Texas Instruments C2000 LaunchPadXL, см. в разделе Аппаратные подключения. Для BOOSTXL-DRV8305 (подключенного к плате LaunchPadXL) требуется сигнал включения. Этот сигнал подключается к GPIO124 контакту процессора.
В обозревателе библиотеки Simulink добавьте пакет поддержки Embedded Coder ® для Texas Instruments C2000™ Processors > F2837xD > Digital Output. В диалоговом окне параметров блока цифрового вывода измените следующие настройки:
| Параметр в блоке цифрового вывода | Настройки |
|---|---|
Группа GPIO | GPIO120~GPIO127 |
GPIO124 | on |
Переименуйте блок в GPIO_124.
Добавление постоянного блока со значением 1 как вход в блок GPIO124, как показано на этом рисунке.
На вкладке «Оборудование» модели Simulink выберите «Построить, развернуть и запустить». При этом генерируется код C, проект CCS и целевой внешний файл. Система использует последовательную связь для загрузки этого целевого внешнего файла на целевое оборудование и запускает загруженный алгоритм в аппаратном обеспечении.
При развертывании модели на цели двигатель работает с разомкнутым контуром, а затем работает с замкнутым контуром управления скоростью. В этом примере рекомендуется использовать последовательную связь для контроля и отладки сигналов. См. пример модели mcb_pmsm_foc_qep_f28379d для получения подробной информации о реализации последовательного приема и передачи данных (между главной и целевой моделями). Из блока последовательного приема обновите блок памяти хранилища данных, чтобы запустить и остановить двигатель.
