Toolbox™ навигации предоставляет алгоритмы и инструменты анализа для планирования движения, одновременной локализации и отображения (SLAM), а также инерциальной навигации. Набор инструментов включает настраиваемые средства поиска и планирования путей на основе выборки, а также метрики для проверки и сравнения путей. Можно создавать 2D и 3D представления карт, создавать карты с помощью алгоритмов SLAM, а также интерактивно визуализировать и отлаживать создание карт с помощью приложения Построитель карт SLAM. Инструментарий предоставляет модели датчиков и алгоритмы для локализации. Можно моделировать и визуализировать данные датчиков IMU, GPS и wheel encoder, а также настраивать комбинированные фильтры для оценки позы с помощью нескольких датчиков.
Приведены примеры применения автоматизированного вождения, робототехники и бытовой электроники. Можно протестировать алгоритмы навигации, развернув их непосредственно на оборудовании (с помощью MATLAB ® Coder™ или Simulink ® Coder ).
В этом примере рассматриваются концепции трехмерных вращений и способы использования кватернионов для описания ориентации и вращений.
В этом примере показано, как моделировать измерения единицы измерения инерции (IMU) с помощью imuSensor(Панель инструментов слияния и отслеживания датчиков) Системный объект.
Этот пример показывает, как оценить положение и ориентацию наземных транспортных средств путем сплавления данных от инерциального измерительного блока (IMU) и приемника глобальной системы позиционирования (GPS).
В этом примере показано, как сопоставить два лазерного сканирования с использованием алгоритма преобразования нормальных распределений (NDT) [1].
Этот пример показывает, как использовать быстро исследуемый алгоритм случайного дерева (RRT) для планирования пути для транспортного средства через известную карту.
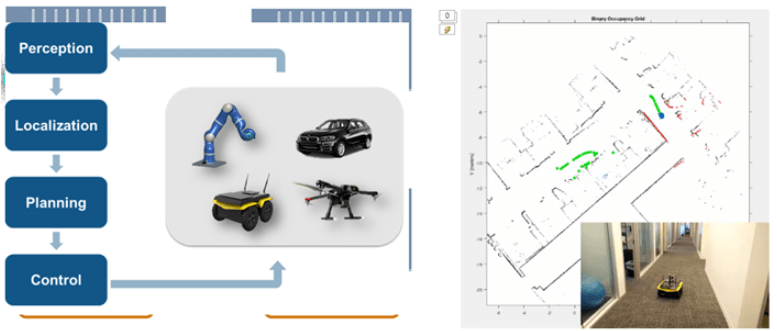
В этом примере показано, как реализовать алгоритм одновременной локализации и отображения (SLAM) на собранной серии сканирований лидара с использованием оптимизации графов позы.
Этот пример демонстрирует, как осуществить алгоритм одновременной локализации и отображения (SLAM) на собранных 3D данных о датчике лидара, используя облако пункта обработка алгоритмов и оптимизации графика позы.
Обзор панели инструментов навигации
Сведения о различных функциях, поддерживаемых в панели инструментов навигации
