Основные функциональные возможности гидроцилиндра двойного действия
Гидроцилиндры
Блок Double-Active Hydracle Cylinder (Simple) представляет собой упрощенную версию гидроцилиндра двойного действия, разработанную для приложений, в которых должна воспроизводиться только базовая функциональность цилиндра, в обмен на лучшую числовую эффективность. По этим причинам предполагается, что такие факторы, как сжимаемость жидкости, трение и утечки, являются незначительными. Предполагается, что жесткие упоры являются полностью неэластичными, чтобы исключить любые возможные колебания в конце хода. Модель особенно подходит для моделирования в реальном времени и HIL (аппаратное обеспечение в цикле), если такие упрощения приемлемы.
Модель описывается со следующими уравнениями:
v
− vC
xR, v < 00otherwise
− x0
x0
где
| F | Сила, создаваемая цилиндром |
| v | Скорость штока цилиндра |
| vR, vC | Абсолютные скорости штока цилиндра и корпуса цилиндра соответственно |
| AA | Площадь поршня со стороны порта А |
| AB | Площадь поршня со стороны порта B |
| pA | Давление в отверстии цилиндра A |
| свинец | Давление в отверстии цилиндра B |
| вопросы и ответы | Расход через порт А в цилиндр |
| qB | Расход через отверстие B из цилиндра |
| x | Положение поршня |
| x0 | Начальное расстояние между поршнем и колпачком А |
| ФК | Сила жесткой остановки |
| ксенон | Расстояние хода поршня до полного выхода из исходного положения |
| xR | Расстояние хода поршня до полного отвода из исходного положения |
| Kp | Коэффициент проникновения |
| S | Ход поршня |
Основным отличием этого блока от блока гидроцилиндра двойного действия является представление жесткого упора:
Блок гидравлических цилиндров двойного действия использует упругую модель упора, которая представляет собой по существу комбинацию пружины и демпфера, соединенных параллельно. Жесткость пружины, представляющей собой контактную жесткость сталкивающихся тел, очень высока, что приводит к высокочастотным колебаниям малой величины в момент столкновения тел. Эти колебания вряд ли можно заметить экспериментально, но их трудно обработать численным моделированием и, как правило, снизить численную эффективность.
Жесткий упор в блоке двухстороннего гидроцилиндра (простой) представлен неупругой моделью, которая по существу представляет собой вязкий демпфер с зависящим от проникновения коэффициентом демпфирования. Этот коэффициент называется коэффициентом проникновения. В неэластичной модели во время удара не возникает колебаний, что приводит к улучшению численной устойчивости и эффективности. Но неэластичная модель остановки имеет функцию, которую необходимо учитывать при выборе модели: столкнувшиеся тела продолжают медленно перемещаться друг в друга до тех пор, пока контакт нагружается сжимающей силой. В реальной жизни это явление похоже на столкновение двух тел, разделённых заметным слоем вязкой жидкости. Требуется некоторое время, чтобы сжать жидкость, прежде чем тела сами вступят в контакт.
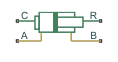
Соединения R и C являются механическими поступательными консервационными отверстиями, соответствующими штоку цилиндра и зажимной конструкции цилиндра соответственно. Соединения A и B являются гидравлическими консервационными портами. Порт А соединен с камерой А, а порт В соединен с камерой В.
Можно настроить направление блока с помощью параметра Ориентация цилиндра (Cylinder orientation).
Трение между подвижными частями не учитывается.
Эффекты инерции не учитываются.
Сжимаемость жидкости не учитывается.
Предполагается, что потоки утечки являются незначительными.
Предполагается, что жесткие упоры являются полностью неэластичными, как объяснено выше.
Камера А - эффективная площадь поршня. Значение по умолчанию: 0.001 м ^ 2.
Камера В - эффективная площадь поршня. Значение по умолчанию: 5e-4 м ^ 2.
Максимальный ход поршня между колпачками. Значение по умолчанию: 0.1 м.
Расстояние между поршнем и колпачком A в начале моделирования. Это значение не может превышать ход поршня. Значение по умолчанию: 0.
Задает свойство проникновения сталкивающихся тел. Чем выше значение коэффициента, тем меньше тела проникают друг в друга, но тем резче увеличение ударной силы. Чтобы узнать значение коэффициента для конкретного приложения, рекомендуется запускать одну и ту же модель с разными моделями жесткой остановки (или с разными моделями цилиндров) до тех пор, пока они не покажут близкие результаты. Значение коэффициента по умолчанию: 1e12 Н/м/( м/с).
Указывает ориентацию цилиндра по отношению к глобально назначенному положительному направлению. Цилиндр может быть установлен двумя различными способами, в зависимости от того, оказывает ли он силу в положительном или отрицательном направлении при приложении давления на его входе. Если давление, приложенное к порту A, оказывает силу в отрицательном направлении, установите для параметра значение Acts in negative direction. Значение по умолчанию: Acts in positive direction.
Блок имеет следующие порты:
AОтверстие гидравлической экономии, связанное с камерой А цилиндра.
BПорт гидравлической экономии, связанный с камерой B цилиндра.
RМЕХАНИЧЕСКОЕ ПОСТУПАТЕЛЬНОЕ КОНСЕРВИРУЮЩЕЕ ОТВЕРСТИЕ, СВЯЗАННОЕ СО ШТОКОМ ЦИЛИНДРА.
CМЕХАНИЧЕСКОЕ ПОСТУПАТЕЛЬНОЕ КОНСЕРВИРУЮЩЕЕ ОТВЕРСТИЕ, СВЯЗАННОЕ С ЦИЛИНДРИЧЕСКОЙ ЗАЖИМНОЙ КОНСТРУКЦИЕЙ.
Пример модели гидравлического привода с замкнутым контуром для моделирования в реальном времени показывает, как использовать этот цилиндр вместе с другими блоками, оптимизированными для моделирования в реальном времени и HIL.
Гидроцилиндр двойного действия | Гидроцилиндр одностороннего действия | Гидроцилиндр одностороннего действия (простой) | Жесткая остановка трансляций | Трансляционный гидромеханический преобразователь
