Исполнительный механизм одностороннего или двойного действия, управляемый давлением пилот-сигнала в изотермической жидкостной сети
Simscape/Жидкости/Приводы клапанов и силы

Блок привода пилотного клапана (IL) моделирует исполнительный механизм одностороннего или двойного действия, управляемый давлением пилотного клапана для управления подключенным клапаном или отверстием в изотермической жидкостной сети.
Для исполнительного механизма одностороннего действия, когда управляющее давление PX - Patm превышает силу предварительной нагрузки пружины в отверстии X, поршень начинает срабатывать в направлении, заданном параметром механической ориентации.
Для привода двойного действия контрольное давление Pcontrol представляет собой разницу между PX - Patm и PY - Patm. Поршень приводится в действие в направлении большего приложенного перепада давлений, противодействуя силе пружины в противоположном отверстии. Когда движение поршня изменяется на противоположное, эта пружина не вытягивается и не оказывает уравновешивающее усилие на положение поршня.
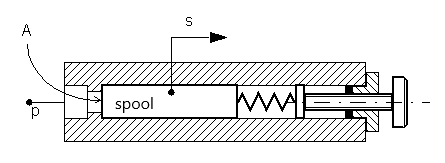
Поршни в портах X и Y прикреплены к одной катушке. Обе пружины восстанавливают катушку в нейтральное положение, когда она падает ниже противодействующего усилия предварительной нагрузки пружины. Для приводов одностороннего действия нейтральное положение находится в порту X. Для приводов двойного действия нейтральное положение находится в центре привода.
Усилие на поршень создается перепадом давления между окном X и атмосферным давлением:
) AX,
где AX - площадь поршня в порте X. Когда усилие пружины больше силы предварительной нагрузки пружины в порте X, поршень начинает двигаться.
Схема привода одностороннего действия
Мгновенное перемещение поршня рассчитывается как:
где устойчивое положение поршня xsteady - положение поршня при текущем перепаде давления, пропорциональном силе пружины при максимальном ходе поршня:
где:
Fpre - сила предварительной нагрузки пружины в порту X.
Fmax - максимальная сила пружины, действующая против перемещения поршня, Fpre, и где K - жесткость пружины в отверстии X.
xstroke - ход поршня от порта X.
λ - механическая ориентация, указывающая на движение поршня в положительном направлении (выпуск) или в отрицательном направлении (уборка).
Если сила на поршне меньше силы предварительной нагрузки пружины при X, поршень остается в нейтральном положении или перемещается в нейтральное положение. Если усилие, приложенное к поршню, соответствует или превышает максимальное усилие пружины, поршень остается на ходу до тех пор, пока приложенное давление не изменится.
Разность сил в окнах X и Y определяет движение поршня:
patm) AY.
Давление, приложенное к отверстию X, смещает золотник в сторону от камеры X и противодействует пружине в отверстии Y. Аналогично, давление, приложенное к отверстию Y, смещает золотник в сторону от камеры Y и противодействует пружине в отверстии X. Когда золотник изменяет направление на противоположное, ранее выдвинутая пружина сжимается, прикладывая усилие к катушке. Ранее сжатая пружина, пружина в отверстии в направлении движения, не выступает и не влияет на положение катушки.
Схема привода двойного действия
Смещение поршня рассчитывается как:
где устойчивое положение поршня xsteady - положение поршня при текущем перепаде давления, пропорциональном силе пружины при максимальном ходе поршня:
Fmax, X − Fpre, Xxstroke
где:
Fpre, X и Fpre, Y - сила предварительной нагрузки пружины в порту X и сила предварительной нагрузки пружины в порту Y соответственно.
Fmax, X и Fmax, Y - максимальные силы пружины, действующие против смещения поршня в окнах X и Y соответственно, где:
Fpre,
K - жесткость пружины на порт.
xstroke - ход поршня на отверстие.
λ - механическая ориентация, которая присваивает сигнал на перемещение поршня как положительный (выпуск) или отрицательный (уборка).
Если сила, действующая на поршень, меньше силы предварительной нагрузки пружины соответствующего отверстия, поршень остается или возвращается в нейтральное положение. Если усилие, приложенное к поршню, соответствует или превышает максимальное усилие пружины для соответствующего отверстия, поршень остается на ходу поршня до тех пор, пока приложенное давление не изменится.
Когда привод близок к полному удлинению или полной уборке, можно сохранить численную устойчивость в моделировании, настроив коэффициент сглаживания блока. При ненулевом коэффициенте сглаживания функция сглаживания применяется ко всем вычисленным силам, но в первую очередь влияет на моделирование в крайних точках движения поршня.
Если для параметра «Конфигурация привода» установлено значение Single-actingнормированная сила на поршне рассчитывается как:
− Fpre.
Если для параметра «Конфигурация привода» установлено значение Double-actingнормализованная сила на поршне при X рассчитывается как:
X − Fpre, X.
нормированная сила при Y вычисляется как:
− Fpre, Y.
Если коэффициент сглаживания s не равен нулю, каждая нормированная сила включает сглаживание:
(F ^ X − 1) 2 + (s4) 2,
(F ^ Y − 1) 2 + (s4) 2.
Привод патронного клапана (IL) | Привод двойного действия (IL) | Контрольный клапан с пилотным управлением (IL) | Привод одностороннего действия (IL)

