Линейное преобразование перепада давления в срабатывание в системе изотермической жидкости
Simscape/Жидкости/Изотермическая жидкость/Исполнительные механизмы
Блок привода двойного действия (IL) моделирует линейное преобразование перепада давления между двумя камерами в движение поршня. Работой поршня управляют с помощью разности давлений, действующей на поршневую пластину, разделяющую камеры. Движение поршня, когда он близок к полному удлинению или полной уборке, ограничивается одной из трех моделей жесткой остановки. Сжимаемость жидкости необязательно моделируется в обеих поршневых камерах.
Каналы А и В представляют собой изотермические впускные отверстия для жидкости. Порт C представляет корпус исполнительного механизма, в то время как скорость поршня возвращается в порт R. Когда положение поршня вычисляется внутри, оно сообщается в канале p, и когда положение устанавливается посредством соединения с соединением Simscape™ Multibody™, оно принимается как физический сигнал в канале p.
Направление перемещения поршня можно определить с помощью параметра Ориентация Mechanical (Mechanical orientation). Если для механической ориентации задано значение Pressure at A causes positive displacement of R relative to Cпоршень проходит, когда перепад давления pA-pB является положительным. Если для параметра «Механическая ориентация» задано значение Pressure at A causes negative displacement of R relative to Cпоршень втягивается для положительного перепада давления между жидкостной и газовой камерами.
Смещение поршня измеряется как положение в отверстии R относительно отверстия C. Механическая ориентация определяет направление перемещения поршня. Перемещение поршня нейтрально, или 0, когда объем камеры А равен мертвому объему камеры. При приеме смещения в качестве входа убедитесь, что производная положения равна скорости поршня. Это происходит автоматически, когда входные данные поступают от соединения блока поступательного многофакторного интерфейса к соединению Simscape Multibody.
Чтобы избежать механических повреждений исполнительного механизма, когда он полностью выдвинут или полностью убран, исполнительный механизм обычно демонстрирует нелинейное поведение, когда поршень приближается к этим пределам. Блок привода двойного действия (IL) моделирует это поведение с помощью выбора из трех моделей жесткого упора, которые моделируют соответствие материала с помощью пружинной демпферной системы. Модели жесткого останова:
Stiffness and damping applied smoothly through transition region, damped rebound.
Full stiffness and damping applied at bounds, undamped rebound.
Full stiffness and damping applied at bounds, damped rebound.
Сила жесткой остановки моделируется, когда поршень находится на верхней или нижней границе. Граничная область находится в пределах переходной области хода поршня или начального перемещения поршня. За пределами этой области 0.
Дополнительные сведения об этих настройках см. на странице Блок поступательного жесткого останова.
При необходимости можно моделировать амортизацию в направлении крайних значений хода поршня. Моделирование амортизации торца цилиндра замедляет движение поршня, когда он приближается к своему максимальному удлинению в соответствующей камере, которое определяется ходом поршня. Дополнительные сведения о функциональных возможностях подушки цилиндра см. в разделе Подушка цилиндра (IL).
При необходимости можно моделировать трение относительно движения поршня. Если для параметра Эффект трения цилиндра (Cylinder friction effect) установлено значение On, результирующее трение представляет собой комбинацию эффекта Стрибека, Кулона и вязкого эффекта. Разность давлений измеряется между давлением в камере и давлением в окружающей среде. Дополнительные сведения о модели трения и ее ограничениях см. в разделе Блок трения цилиндра.
При необходимости можно моделировать утечку между жидкостными камерами и поршневым резервуаром. Если для параметра Внутренняя утечка установлено значение On, поток Пуасейля моделируется между поршнем и цилиндром. Этот блок использует блок ламинарной утечки (IL) библиотеки Simscape Foundation. Расход рассчитывается следующим образом:
))
где:
λ - кинематическая вязкость жидкости.
L - длина поршня, p - P0.
pA - давление в порту A.
penv - давление окружающей среды, которое выбрано в параметре спецификации давления окружающей среды.
Диаметр цилиндра d0 равен 2c, где c - зазор между поршнями, а диаметр поршня di 4APπ, где AP - среднее значение площади поперечного сечения поршня в камере А и площади поперечного сечения поршня в камере В.
В крайних точках зон отверстий подушки A и B и диапазонов давления обратного клапана можно поддерживать численную устойчивость при моделировании, регулируя коэффициент сглаживания блока. Функция сглаживания применяется ко всем вычисленным площадям и давлению клапанов, но в первую очередь влияет на моделирование в крайних пределах этих диапазонов.
Нормированная площадь диафрагмы рассчитывается как:
Алеак).
где:
Aleak - зона протечки подушки А и подушки В между плунжером и втулкой подушки.
Amax - площадь поперечного сечения подушки А и подушки В.
Коэффициент сглаживания f применяется к нормализованной области:
(A ^ − 1) 2 + (f4) 2.
Сглаженная площадь отверстия:
+ Aleak.
Аналогичным образом нормированное давление клапана составляет:
pcracking).
где:
pcracking - перепад давления крекинга обратного клапана подушки.
pmax - максимальный перепад давления обратного клапана подушки.
Сглаживание, применяемое к нормализованному давлению:
(p ^ − 1) 2 + (f4) 2,
и сглаженное давление составляет:
pcracking.
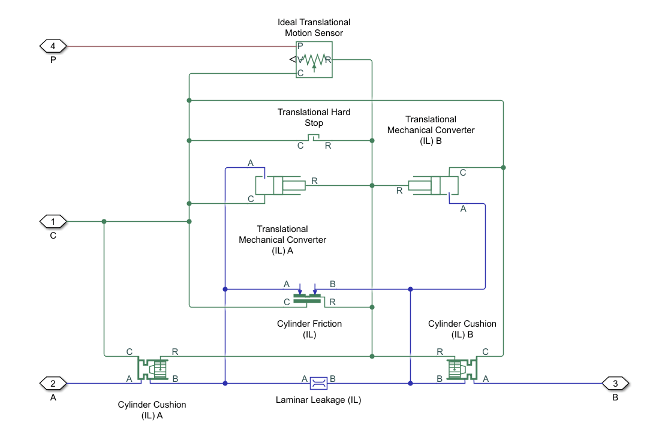
Блок привода двойного действия (IL) состоит из четырех блоков Simscape Foundation:
и два блока библиотеки изотермической жидкости:
Привод двойного действия (G-IL) | Поворотный привод двойного действия (IL) | Привод сервоклапана двойного действия (IL) | Привод одностороннего действия (IL)


