Линейный привод с поршневым движением, управляемый одной камерой термической жидкости
Simscape/Жидкости/Термическая жидкость/Исполнительные механизмы
Блок однонаправленного привода (TL) моделирует линейный привод с движением поршня, управляемым одной камерой термической жидкости. Привод создает силу в тактах выпуска и уборки, но сила срабатывания зависит от избыточного давления в одной камере.
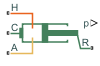
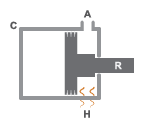
На рисунке показаны ключевые компоненты модели привода. Отверстие А представляет собой впускное отверстие камеры термической жидкости. Отверстие R представляет собой перемещающийся поршень исполнительного механизма, а отверстие C - корпус исполнительного механизма. Порт Н представляет собой тепловую поверхность раздела между камерой термической жидкости и окружающей средой.
Схема привода одностороннего действия
Смещение поршня измеряется как положение в отверстии R относительно отверстия C. Механическая ориентация определяет направление перемещения поршня. Перемещение поршня нейтрально, или 0, когда объем камеры равен мертвому объему. При приеме смещения в качестве входа убедитесь, что производная положения равна скорости поршня. Это происходит автоматически, когда входные данные поступают от соединения блока поступательного многофакторного интерфейса к соединению Simscape Multibody.
Направление движения поршня зависит от настройки механической ориентации в диалоговом окне блока. Если механическая ориентация положительная, то положительное манометрическое давление в отверстии А дает положительное перемещение поршня относительно корпуса привода. Направление движения изменяется на противоположное для отрицательной механической ориентации.
Набор жестких упоров ограничивает диапазон перемещения поршня. Жесткие упоры рассматриваются как пружинно-демпферные системы. Коэффициент жесткости пружины управляет восстановительной составляющей силы контакта жесткого упора и коэффициентом демпфирования диссипативной составляющей.
Жесткие упоры расположены на дистальных концах хода поршня. Если механическая ориентация положительна, то нижний жесткий упор находится при x = 0, а верхний жесткий упор - при x = + обводке. Если механическая ориентация отрицательная, то нижний жесткий упор находится при x = -ударе, а верхний жесткий упор - при x = 0.
Этот блок является составным компонентом на основе блоков Simscape™ Foundation:
Составная компонентная схема
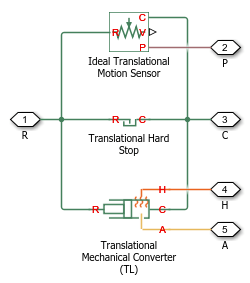
A - Отверстие для сохранения термической жидкости, представляющее собой камеру A
C - Поступательный консервационный порт, представляющий корпус привода
R - Поступательный консервационный порт, представляющий поршень привода
H - Теплосохранительный порт, представляющий тепловую поверхность между камерой А и окружающей средой
p - Порт ввода физического сигнала для данных о положении поршня. Чтобы открыть этот порт, установите перемещение поршня из камеры A в Provide input signal from Multibody joint.
p - Порт вывода физического сигнала для данных о положении поршня. Чтобы открыть этот порт, установите перемещение поршня из камеры A в Calculate from velocity of port R relative to port C.
Ориентация поршня привода относительно направления потока. Положительная ориентация заставляет поршень двигаться в положительном направлении относительно корпуса привода в ответ на положительный расход через порт A. По умолчанию установлено значение Pressure at A causes positive displacement of R relative to C.
Механическая ориентация влияет на размещение жестких упоров привода. Одна жесткая остановка всегда находится в нулевом положении. Второй жесткий упор находится на расстоянии хода поршня, если механическая ориентация положительна, и на минусовом расстоянии хода поршня, если механическая ориентация отрицательна.
Площадь, перпендикулярная направлению потока в камере привода А. Блок использует эту площадь для вычисления гидравлической силы, обусловленной давлением жидкости в камере А. Площадь поперечного сечения поршня должна быть больше нуля. Значение по умолчанию: 0.01 м ^ 2.
Максимальное расстояние, на которое может перемещаться поршень привода. Ход поршня должен быть больше нуля. Значение по умолчанию: 0.1 м.
Жесткие упоры ограничивают движение поршня длиной хода поршня. Одна жесткая остановка расположена в нулевом положении. Второй жесткий упор находится на расстоянии хода поршня, если для параметра Механическая ориентация (Mechanical Orientation) задано значение Pressure at A causes positive displacement of R relative to C и при минусовом ходе поршня, если для параметра Механическая ориентация (Mechanical Orientation) установлено значение Pressure at A causes negative displacement of R relative to C.
Объем жидкости, остающийся в камере привода при нулевом перемещении поршня. Блок использует этот объем для учета накопления массы и энергии в камере, когда поршень находится в нулевом положении. Мертвый объем должен быть больше нуля. Значение по умолчанию: 1e-5 м ^ 3.
Выбор давления окружающей среды. Опции включают Atmospheric pressure и Specified pressure. Выбор Specified pressure открывает дополнительный параметр «Давление окружающей среды».
Давление вне корпуса привода. Это давление противодействует давлению внутри камеры привода. Нулевое значение соответствует вакууму. Значение по умолчанию: 0.101325 МПа. Этот параметр отображается только в том случае, если для параметра Environment pressure specification установлено значение Specified pressure.
Коэффициент пружины жесткого упора привода. Коэффициент пружины составляет восстановительную часть силы контакта жесткого упора. Увеличьте значение коэффициента, чтобы смоделировать более жесткий контакт. Значение по умолчанию: 1e10 Н/м.
Коэффициент демпфирования жестких упоров привода. Коэффициент демпфирования составляет диссипативную часть силы жесткого контакта. Увеличьте значение коэффициента, чтобы уменьшить отскок при контакте. Значение по умолчанию: 150 Н/( м/с).
Моделирование подхода для жестких остановок. Варианты включают в себя:
Stiffness and damping applied smoothly through transition region (по умолчанию) - масштабирование величины контактной силы от нуля до ее полного значения по заданной длине перехода. Масштабирование носит полиномиальный характер. Функция масштабирования многочлена является численно гладкой и не производит нулевых пересечений любого рода.
Full stiffness and damping applied at bounds, undamped rebound - Применить полное значение расчетного контактного усилия при нарушении положения жесткого упора. Контактная сила представляет собой смесь пружинных и демпфирующих сил во время проникновения и пружинной силы - без демпфирующей составляющей - во время отскока. Сглаживание не применяется.
Full stiffness and damping applied at bounds, damped rebound - Применить полное значение расчетного контактного усилия при нарушении положения жесткого упора. Контактная сила представляет собой смесь пружинных и демпфирующих сил во время как проникновения, так и отскока. Сглаживание не применяется. Это модель hard-stop, использовавшаяся в предыдущих выпусках.
Расстояние, ниже которого масштабирование применяется к силе жесткого упора. Контактное усилие равно нулю, если расстояние до жесткого упора равно указанному здесь значению. Оно имеет полное значение, когда расстояние до жесткой остановки равно нулю. Значение по умолчанию - 1 mm..
СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОРШНЯ. Блок может получить позицию из блока Multibody, если установлен в Provide input signal from Multibody joint. Значение по умолчанию: Calculate from velocity of port R relative to port C.
Положение поршня в начале моделирования. Это значение должно находиться в диапазоне от нуля до хода поршня, если для параметра Ориентация Mechanical (Mechanical orientation) задано значение Pressure at A causes positive displacement of R relative to C. Значение должно находиться в диапазоне от нуля до минус хода поршня, если для параметра Ориентация Mechanical (Mechanical orientation) задано значение Pressure at A causes negative displacement of R relative to C. Значение по умолчанию: 0 м. Чтобы включить этот параметр, установите для параметра Перемещение поршня из камеры А значение Calculate from velocity of port R relative to port C.
Температура в камере привода А в начале моделирования. Значение по умолчанию: 293.15 K.
Возможность моделирования эффектов из-за динамической сжимаемости жидкости. Выбрать On для обеспечения гидравлической динамической сжимаемости и Off чтобы отключить его.
Давление в камере привода А в начале моделирования. Значение по умолчанию: 0.101325 МПа.
