Система электропередачи с натянутым ремнем, соединяющим два шкива
Simscape/Привод/Муфты и приводы

Блок ременного привода представляет собой пару шкивов, соединенных гибким идеальным, плоским или V-образным ремнем. Идеальный ремень не скользит относительно поверхностей шкива.
Модель учитывает трение между гибким ремнем и периферией шкива. Если сила трения недостаточна для возбуждения нагрузки, модель допускает проскальзывание. Взаимосвязь между напряжениями в плотных и свободных ветвях соответствует уравнению Эйлера. Модель учитывает центробежную нагрузку на гибкий ремень, инерцию шкива и трение подшипника.
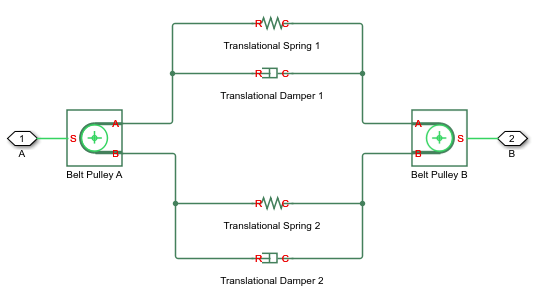
Блок Ременного привода - структурный компонент на основе Демпферов Симскэйп Трэнслэйшнэл Спринг и Блока-полиспаста и Трэнслэйшнэл Пояса Simscape™ Driveline™. Блоки поступательной пружины и поступательного демпфера моделируют соответствие ремня. Уравнения, регулирующие динамику контакта между ремнем и шкивом, см. в разделе Блок шкива ремня. На рисунке показана блок-схема блока ременного привода.
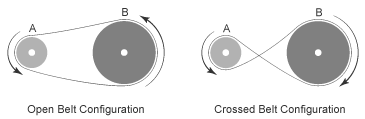
На диаграммах показаны конфигурации открытого и скрещенного ременного привода. В конфигурации с открытым ремнем оба шкива имеют тенденцию вращаться в одном направлении, а больший шкив имеет больший угол обертывания ремня. В конфигурации с перекрещенной лентой шкивы стремятся вращаться в противоположных направлениях и имеют одинаковый угол обертывания.
Схемы ременного привода
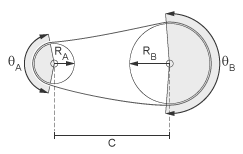
В открытой конфигурации угол обертывания ремня вокруг каждого шкива задается выражением:
где:
δ А - угол обертывания шкива А.
startB - угол обертывания шкива B.
RA - эффективный радиус шкива А.
RB - эффективный радиус шкива B.
C - расстояние между центрами шкивов А и В.
На схеме показаны углы и параметры обтекания открытой конфигурации.
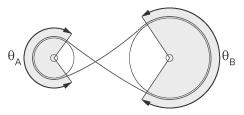
В пересеченной конфигурации два угла обертывания равны, и угол обертывания ремня вокруг каждого шкива равен
На схеме показаны углы и параметры сворачивания замкнутой конфигурации.
Шкивы не перемещаются.
Коэффициент трения и порог скорости трения между ремнем и каждым из шкивов одинаковы.
