Элемент силовой передачи с фрикционным ремнем, обвитым по окружности шкива
Simscape/Привод/Муфты и приводы

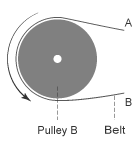
Блок ременного шкива представляет собой шкив, обернутый гибким идеальным, плоским или V-образным ремнем. Идеальный ремень не скользит относительно поверхности шкива. Шкив может, по выбору, перемещаться через порт С, что необходимо в блочной и управляемой системе.
Блок обеспечивает трение между гибким ремнем и периферией шкива. Если сила трения недостаточна для возбуждения нагрузки, блок допускает скольжение. Взаимосвязь между напряжениями в плотных и свободных ветвях соответствует уравнению Эйлера. На блок приходится центробежная нагрузка на гибкий ремень, инерция шкива и трение подшипника.
Можно выбрать относительное направление движения ремня. Два конца ремня могут перемещаться в равных или противоположных направлениях. Блок предполагает несоответствие ремню и пренебрегает потерями из-за обертывания ремня вокруг шкива.
Блочные уравнения моделируют передачу мощности между ветвями ремня или к шкиву или от него. Плотные и свободные ветви используют один и тот же расчет. Без достаточного натяжения сила трения недостаточна для передачи мощности между шкивом и ремнем.
Модель действительна, когда оба конца ремня натянуты. Можно выбрать отображение предупреждения в программе Simulink ® Diagnostic Viewer при потере натяжения переднего конца ремня. При сборке модели убедитесь, что натяжение поддерживается на протяжении всего моделирования. Это можно сделать путем добавления массы по крайней мере к одному из концов ремня или путем добавления натяжного устройства в модель. Используйте Средство просмотра переменных (Variable Viewer) для проверки натяжения пружин, прикрепленных к ремню. Дополнительные сведения о создании натяжного устройства см. в разделе Рекомендации по моделированию сетей шкивов .
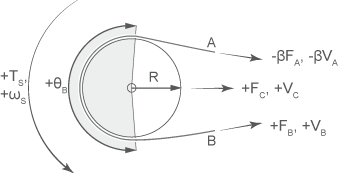
Кинематические зависимости между шкивом и ремнем:
Если для параметра «Тип ремня» задано значение V-belt или Flat belt и установить центробежную силу в Model centrifugal forceцентробежная сила составляет:
VC) 2.
Когда шкив может перемещаться, уравнение балансировки силы является:
⋅sin (start2),
где:
β - знак направления ремня. При установке для параметра «Направление ремня» значения Ends move in same direction, β = 1. В противном случае β = -1.
Vrel - относительная скорость между поясом и периферией шкива. Vrel = 0 для идеального корпуса шкива.
VA - линейная скорость ветви A.
VB - линейная скорость ветви B.
VC - линейная скорость шкива в его центре. Если шкив не переводится, эта переменная фиксируется как 0.
λ S - угловая скорость шкива.
R - радиус шкива.
Фцентрифугаль - это ленточная центробежная сила.
FC - сила, действующая через центроид шкива. При задании значения параметра Инерция (Inertia) FC включает силу, обусловленную ускорением массы шкива.
start- линейная плотность ремня.
Ffr - сила трения между шкивом и ремнем.
ТВС - сила, действующая вдоль ветви А.
FB - сила, действующая вдоль ветви B.
f - коэффициент трения. Это эквивалентно параметру Коэффициент трения контакта.
λ - угол контактной обертки.
Соглашение о знаках таково, что если для параметра «Направление пояса» задано значение Ends move in opposite directionположительное вращение в порте S имеет тенденцию давать отрицательное преобразование для порта A и положительное преобразование для порта B.
Для плоского ремня задайте значение f в качестве параметра Коэффициент трения контакта. Для клиновой ленты блок вычисляет значение как
δ 2),
где:
f '- эффективный коэффициент трения для клиновой ленты.
Λ - угол шкива V-образного ремня.
Коэффициент трения является функцией относительной скорости, такой, что
4VrelVthr),
где
λ - мгновенное значение коэффициента трения.
f - установившееся значение коэффициента трения.
Vthr - порог скорости трения.
Порог скорости трения управляет шириной области, в которой коэффициент трения изменяет свое значение от нуля до установившегося максимума. Порог скорости трения определяет скорость, при которой гиперболическая касательная равна 0,999. Чем меньше значение, тем круче изменение λ.
Блок определяет влияние трения на силу на концах ремня следующим образом:
Fcentrifugal) estart,
который следует форме формулы Эйтельвейна для трения ремня. Крутящий момент, действующий на шкив, составляет:
R
где:
λ = 1, если для параметра «Тип ремня» установлено значение Ideal - No slip. В противном случае
FBFthr).
TS - крутящий момент шкива.
b - вязкое демпфирование подшипника.
Fthr - порог силы.
Блок пренебрегает податливостью по длине ремня.
Оба конца ремня поддерживают адекватное натяжение на протяжении всего моделирования.
Блок обрабатывает перемещение центра шкива как плоское, где шкив перемещается вдоль биссекта угла обертывания шкива. Центральная скорость VC и сила FC учитывают только компонент вдоль этой линии движения.
Уравнение Эйтельвейна для трения ремня игнорирует влияние перемещения шкива на трение.


