Фрикционный тормоз с двумя поворотными колодками, диаметрально расположенными вокруг вращающегося барабана с срабатывающим разломом
Simscape/Привод/Тормоза и фиксаторы/Вращение

Двухшаговый тормозной блок представляет собой фрикционный тормоз с двумя поворотными жесткими колодками, которые прижимаются к вращающемуся барабану для осуществления тормозного действия. Жесткие колодки расположены внутри или снаружи вращающегося барабана в диаметрально противоположной конфигурации. Положительное приводное усилие заставляет жесткие колодки прижиматься к вращающемуся барабану. Вязкое и контактное трение между барабаном и жесткими поверхностями башмака приводит к замедлению вращающегося барабана.
Двухбоковые тормоза обеспечивают высокий тормозной момент с небольшими отклонениями привода в применениях, которые включают в себя автомобили и некоторые тяжелые машины. Модель использует простую параметризацию с легкодоступной геометрией тормоза и параметрами трения.
Также можно включить сбои. При возникновении неисправности ремень будет прикладывать силу, заданную пользователем. Неисправности могут возникать в указанное время или из-за внешнего триггера в порту T.
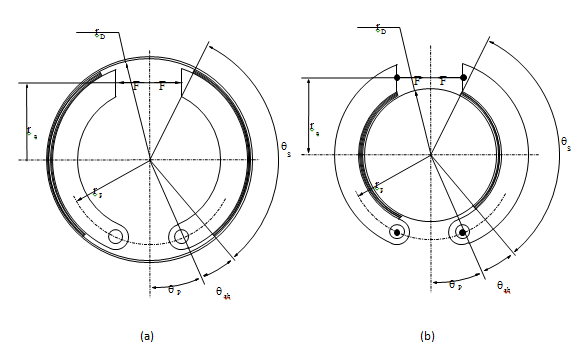
На схеме а) представляет внутренний двухбоковый тормоз, и b) представляет внешний двухбоковый тормоз. В обеих конфигурациях положительное приводное усилие F приводит фрикционные поверхности башмака и барабана в контакт. Результатом является крутящий момент трения, который вызывает замедление вращающегося барабана. Нулевые и отрицательные силы не приводят фрикционные поверхности башмака и барабана в контакт и создают нулевой тормозной момент.
Модель использует длинноботиночное приближение. Уравнения крутящего момента трения, которые развиваются у передней и задней обуви:
синa,
синa,
rpcosstartp,
где для ,
starts,
и для ,
§ 2.
Где:
TLS - тормозной момент, развиваемый ведущей колодкой.
TTS - тормозной момент, развиваемый задней колодкой.
λ - эффективный коэффициент контактного трения.
pa - максимальное линейное давление в ведущем контакте башмака-барабана.
pb - максимальное линейное давление в хвостовом контакте башмака-барабана.
rD - радиус барабана.
startsb - начальный угол колодки.
λ s - угол пролета обуви.
λ a - угол от оси шарнира до точки максимального давления.
c - длина плеча силы цилиндра относительно шарнирного пальца.
rp - радиус расположения контактов.
startp - угол расположения шарнирного штифта.
ra - радиус расположения привода.
Модель предполагает, что на контакт поверхности колодочного барабана действует только кулоновское трение. Нулевая относительная скорость между барабаном и башмаками создает нулевое кулоновское трение. Чтобы избежать разрывов при нулевой относительной скорости, формула коэффициента трения использует гиперболическую функцию
4startshaftstartthreshold),
где:
λ - эффективный коэффициент контактного трения.
мкКулон - коэффициент контактного трения.
λ вал - скорость вала.
startthreshold - порог угловой скорости.
Уравновешивание моментов, которые действуют на каждый башмак относительно штифта, приводит к давлению, действующему на контакт поверхности башмака-барабана. Уравнения для определения баланса моментов для ведущего башмака:
MFc,
sin2startsb]),
и
cos2startsb]),
где:
F - сила срабатывания.
MN - это момент, действующий на ведущий башмак из-за нормальной силы.
MF - момент, воздействующий на ведущий башмак за счет силы трения.
c - длина плеча силы цилиндра относительно шарнирного пальца.
pa - максимальное линейное давление на поверхности контакта башмака с барабаном.
rp - радиус расположения контактов.
startp - угол расположения шарнирного штифта.
ra - радиус расположения привода.
Модель не имитирует самоблокирующиеся тормоза. Если геометрия тормоза и параметры трения вызывают состояние самоблокировки, модель создает ошибку моделирования. Тормоз самоблокируется, если момент трения превышает момент, обусловленный нормальными силами, то есть когда MF > MN.
Баланс моментов для заднего башмака
MFc.
Чистый тормозной момент равен
*
где micvisc - коэффициент вязкого трения.
Когда неисправности включены, усилие ремня прикладывается в ответ на один или оба из следующих триггеров:
Время моделирования - сбой происходит в указанное время.
Поведение моделирования - сбой происходит в ответ на внешний триггер. При этом открывается порт T.
При возникновении триггера неисправности входное усилие заменяется на усилие ремня при сбойном значении для оставшейся части моделирования. Значение 0 означает, что никакого торможения не произойдет. Относительно большое значение означает, что тормоз застрял.
В Simulink Diagnostic Viewer с параметром Reporting when fault (Отчеты о возникновении отказа) можно настроить блок для выдачи отчета о неисправности в виде предупреждения или сообщения об ошибке.
Можно моделировать эффекты теплового потока и изменения температуры, открывая дополнительный тепловой порт. Чтобы открыть порт, в параметрах трения задайте для параметра «Тепловой порт» значение Model. При отображении порта также отображается или изменяется значение по умолчанию для следующих параметров, параметров и переменных:
Трение > Температура
Коэффициент трения > Вектор коэффициента статического трения
Коэффициент трения > Кулонный вектор коэффициента трения
Коэффициент трения > Вектор коэффициента трения контакта
Тепловой порт > Тепловая масса
Переменные > Температура
Параметры «Переменные» используются для установки приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
Настройки переменных отображаются только в том случае, если в настройках трения для параметра «Тепловой порт» установлено значение Model.
Углы контакта менее 45 ° дают менее точные результаты.
Тормоз использует длиннобоковое приближение.
Геометрия тормоза не самоблокируется.
Модель не учитывает расход потока исполнительного механизма.
