Планетарная шестерня с двумя солнечными шестернями и двумя планетарными шестернями
Simscape/трансмиссия/зубчатые колеса

Блок Ravigneaux Gear представляет планетарную зубчатую передачу с двойными солнечными и планетарными зубчатыми колесами. Две солнечные шестерни расположены в центре и разделены в продольном направлении вдоль общей оси вращения. Меньшая из этих шестерен входит в зацепление с внутренней планетарной шестерней, которая, в свою очередь, входит в зацепление с внешней планетарной шестерней. Внешний сателлит, длина которого охватывает расстояние между двумя солнечными шестернями, входит в зацепление как с большей солнечной шестерней, так и с кольцевой шестерней.
Водило удерживает планетарные зубчатые передачи на месте под разными радиусами. Водило, жестко соединяющееся с приводным валом, может вращаться как узел относительно солнечного и кольцевого зубчатых колес. Поворотные соединения, каждое из которых расположено между планетарной шестерней и водилом, позволяют шестерням вращаться вокруг их отдельных продольных осей.
Относительные угловые скорости солнечных, планетарных и кольцевых зубчатых колес следуют из кинематических зависимостей между ними. Дополнительные сведения см. в разделе Уравнения.

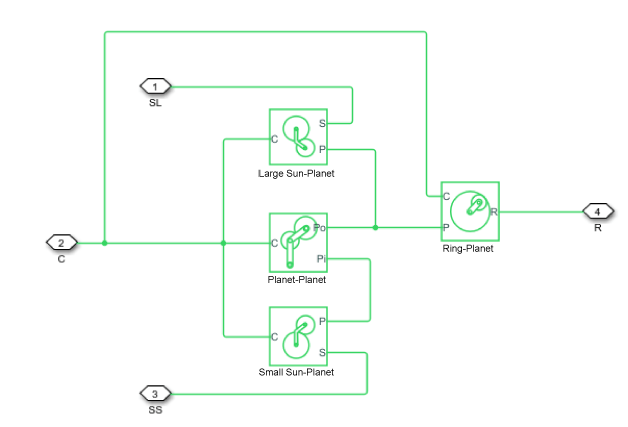
Блок моделирует механизм Ravigneaux как структурный компонент на основе Планеты Солнца, Планеты Планеты и блоков Ring-Planet Simscape™ Driveline™. На рисунке показана эквивалентная блок-схема этого структурного компонента.
Для повышения точности модели зубчатого колеса можно задать такие свойства, как инерция зубчатого колеса, потери сетки и потери вязкости. По умолчанию предполагается, что инерция передачи и потери вязкости являются незначительными. Блок позволяет задать инерции зубчатых колес внутренней планеты. Чтобы смоделировать инерции носителя, больших солнечных, малых солнечных и кольцевых зубчатых колес, подключите блоки Simscape Inertia к портам C, SL, SS и R.
Можно смоделировать влияние теплового потока и изменения температуры, включив дополнительный тепловой порт. Чтобы включить порт, задайте для модели трения значение Temperature-dependent efficiency.
Блок Ravigneaux Gear накладывает четыре кинематические и четыре геометрические зависимости на четыре соединенные оси и два внутренних колеса (внутренняя и внешняя планетарные передачи):
rPigroupPi
rPi
rPogroupPo
rPo
+ rPi
rPostartPo
rPo
где:
rCi - радиус внутреннего водила.
λ C - угловая скорость зубчатых колес водила.
rSS - радиус малой солнечной шестерни.
Λ SS - угловая скорость малой солнечной шестерни.
rPi - радиус внутренней планетарной шестерни.
startPi - угловая скорость внутренней планетарной шестерни.
rCo - радиус внешнего водила.
rSL - радиус большой солнечной шестерни.
λ SL - угловая скорость большой солнечной шестерни.
rPo - радиус зубчатого колеса внешней планеты.
startPo - угловая скорость внешней планетарной шестерни.
λ R - угловая скорость зубчатого венца.
Отношение кольца к солнцу:
NR/NSS
NR/NSL
где:
gRSS - это отношение кольца к малому солнечному зубчатому колесу.
NR - количество зубьев в кольцевом зубчатом колесе.
NSS - количество зубьев в малом солнечном зубчатом колесе.
gRSS - отношение числа солнечных зубчатых колес между кольцом и большим.
NSL - количество зубьев в большой солнечной шестерне.
В терминах этих передаточных чисел ключевыми кинематическими ограничениями являются:
gRSLstartR − startSL
Шесть степеней свободы уменьшаются до двух независимых степеней свободы. Зубчатые пары (1,2) = (LS, P), (SS, P), (P, R) и (P, P).
Предупреждение
Передаточное число gRSS должно быть строго больше передаточного числа gRSL. Передаточное число gRSL должно быть строго больше единицы.
Передача крутящего момента:
, R) = 0
R) = 0
где:
TiSS - передача крутящего момента для малой солнечной шестерни.
δR - передача крутящего момента для кольцевого зубчатого колеса.
(SS, R) - потеря передачи крутящего момента между малой солнечной шестерней и кольцевой шестерней.
TiSL - передача крутящего момента для большой солнечной шестерни.
(SL, R) - потеря передачи крутящего момента между большой солнечной шестерней и кольцевой шестерней.
В идеальном случае, когда потери крутящего момента нет, startloss = 0.
В неидеальном случае, startloss ≠ 0. Дополнительные сведения см. в разделе Модель зубчатых колес с потерями.
Зубчатые колеса считаются жесткими.
Кулонское трение замедляет моделирование. Дополнительные сведения см. в разделе Корректировка точности модели.
