Физическое соединение, обеспечивающее передачу напряжения
Simscape/Привод/Муфты и приводы
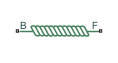
Блок каната представляет собой элемент, который передает натяжение между двумя контактными точками. Вы можете рассматривать его как произвольное устройство передачи натяжения для моделирования различных ситуаций, включая сети шкивов, тросовые приводы и змеевидные ремни. Можно выбрать, проявляет ли блок слабину при потере натяжения. Блок имеет базовый порт В и следящий порт F. Трос растягивается в натяжении, когда базовый порт ведет следящий порт.
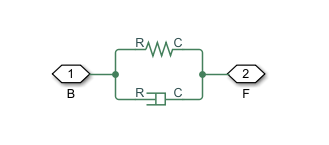
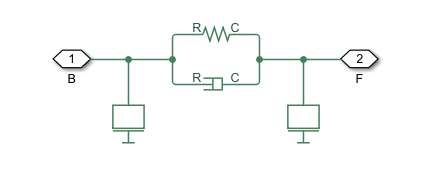
Блок учитывает только продольное поступательное движение и силу концов каната. В идеальном случае блок эквивалентен системе демпфер-пружина или демпфер-пружина-масса, показанной на рисунках, в зависимости от выбора модели массы. Эти цифры не обязательно применяются при моделировании ослабления.
Совет
Убедитесь, что модель работает правильно, а для параметра «Модель каната» задано значение Ideal - No tension. Находясь в этом режиме, убедитесь, что порты B и F правильно ориентированы, просмотрев графики натяжения каждого каната в окне Simscape Results Viewer и найдя неожиданные отрицательные значения.
Имитация каната с произвольными физическими свойствами осуществляется путем корректировки параметров блока. Блок каната может действовать как ремень, трос или любое другое устройство, которое обладает прочностью на разрыв и передает натяжение между двумя точками контакта. Точкой контакта может быть шкив, барабан или идеальный источник.
Блок пригоден для моделирования стационарных или подвижных шкивных сетей. Можно управлять блоком «Канат» с такими источниками, как блок «Источник идеальной поступательной скорости» или блок «Канатный барабан», прикрепленный к блоку «Источник идеальной силы».
Для большей точности или цифровой стабильности можно смоделировать влияние массы на систему. Если для параметра «Масса модели» задано значение Onблок распределяет половину общей массы на каждый конец каната. Добавление даже небольшого количества массы может улучшить инициализацию модели. Можно также указать начальные условия каната. При моделировании провисания блок перестанет применять жесткость и демпфирование, когда трос больше не будет натягиваться.
Блок каната характеризует внешнюю нагрузку в базовом порту как
+ K (xs (t)) xs (t),
и у порта следящего устройства,
− K (xs (t)) xs (t),
где xF (t). Силы изменяются как функции времени и деформации растяжения, xs. Здесь K и B являются функциями xs, K (xs) = K, когда нет слабости или вы не имитируете слабину. В противном случае K (xs) = 0, когда возникает провал. есть, когда xs < 0. Та же логика применима к В. Игнорировать массовые члены, если не выполняется моделирование массы.
Переменные имеют следующие значения:
F - сила натяжения, где − FF.
K - коэффициент жесткости пружины. = 0 при установке для модели каната значения Model rope slack и 0.
D - коэффициент демпфирования.
m - общая масса. Это эквивалентно параметру «Масса». Блок распределяет половину общей массы на каждый конец.
xB - позиция базового узла.
xF - позиция узла-толкателя.
xs - деформация, обусловленная растяжением. Это эквивалентно переменной Stretch.
ẋs - скорость растяжения.
Вкладка «Переменные» используется для задания приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
Ременной шкив | Идеальный источник силы | Идеальный источник поступательной скорости | Канатный барабан | Жесткая остановка трансляций


