В этом примере показана передача, зацепляемая, а затем расцепляемая с помощью пользовательского сцепления. Крутящий момент и движение передаются от одного вала к другому в течение конечного интервала времени.
Общей задачей в конструкции трансмиссии является передача движения и крутящего момента при различных фиксированных передаточных числах. Трансмиссии обычно предназначены для переключения между множеством различных передаточных чисел. Осуществление переключения с одного передаточного числа на другое требует постепенного расцепления одного комплекта муфт трансмиссии и зацепления другого комплекта. Муфты позволяют постепенно зацеплять и разъединять валы трансмиссии друг от друга. Блок дискового фрикционного сцепления представляет собой стандартное сцепление на основе поверхностного трения, которое моделирует это поведение.
Модель в этом примере использует пользовательскую подсистему сцепления, которая содержит блок сцепления с основным трением. Блок Fundamental Friction Clutch требует более полного определения статического и кинетического трения сцепления, чем блок Disk Friction Clutch, поскольку он более подробно моделирует сцепления. См. также Модель фрикционных сцеплений на фундаментальном уровне.
Примечание
Можно моделировать непрерывную передачу вращающего момента с помощью блока гидротрансформатора, который моделирует вязкость жидкости вместо поверхностного трения и не блокирует.
Откройте модель. В командной строке MATLAB ® введите
sdl_clutch_custom
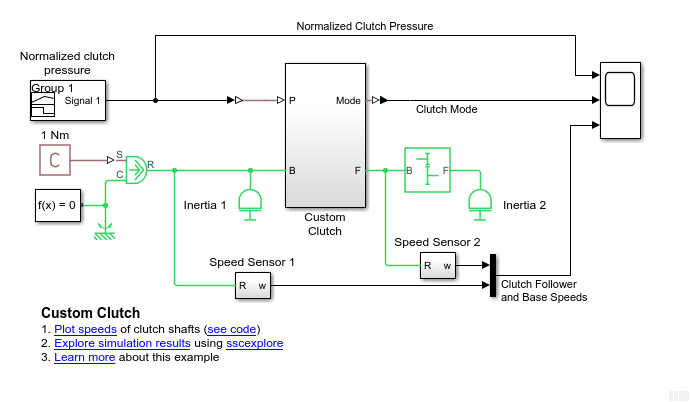
Пользовательская модель сцепления с запрограммированным давлением сцепления
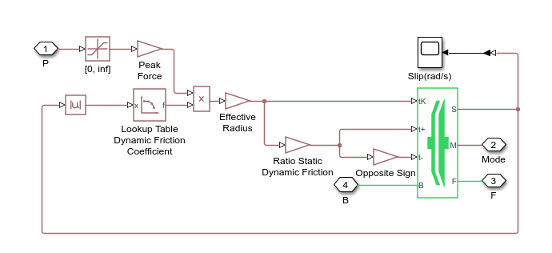
Пользовательская подсистема сцепления
Компоненты модели
Подсистема сцепления расположена между блоками Inertia 1 и Simple Gear и сообщает режим сцепления (вперед, назад, заблокирован).
Блок PS Constant заменяет синусоидальный сигнал в качестве входного момента. Блоки датчиков крутящего момента опущены.
Блоки Simulink-PS Converter и PS-Simulink Converter взаимодействуют между физическими сигналами в среде Simscape™ и блоками Simulink ®, такими как Signal Builder и Scope.
Блок Signal Builder обеспечивает запрограммированный сигнал давления сцепления, нормализованный между 0 и 1, как показано в следующей таблице. Этот сигнал преобразуется в физическое давление внутри подсистемы сцепления.
| Временной диапазон (секунды) | Значение сигнала |
|---|---|
| 0–2 | 0 |
| 2–4 | 0-0,8 с постоянным наклоном |
| 4–6 | 0.8 |
| 6–7 | 0,8-0 с постоянным наклоном |
| 7–10 | 0 |
Откройте области и запустите моделирование. Нормализованный сигнал давления сцепления следует профилю, созданному в Signal Builder, и определяет поведение модели.
С 0 до 2 секунд скорость инерции 1 линейно увеличивается, потому что она подвержена постоянному крутящему моменту.
Через 2 секунды сцепление начинает включаться, и Инерция 2 начинает крутиться. Скорость инерции 1 продолжает расти, хотя и с более низкой скоростью, потому что две инерции теперь имеют общий внешний крутящий момент.
Через 4 секунды давление достигает своего максимума. Примерно через 5,32 секунды сцепление блокируется. Приводные валы, соединенные муфтой, теперь вращаются вместе. Инерция 1 и Инерция 2 продолжают ускоряться при постоянных ускорениях, Инерция 2 - при половине скорости Инерции 1.
Через 6 секунд муфта начинает выходить из зацепления по мере падения давления. Инерция 1 и Инерция 2 продолжают ускоряться с приложенным крутящим моментом.
Муфта разблокируется примерно через 6,73 секунды и полностью отключается через 7 секунд. (Муфта немного разблокируется перед полным отключением, потому что давление, даже перед исчезновением, становится слишком малым, чтобы поддерживать замок.) Инерция 1 все еще ускоряется. Но Инерция 2, теперь свободная от карданного вала и его крутящего момента, больше не разгоняется и вместо этого крутится с постоянной скоростью без фрикционных потерь.
Пока два вала заблокированы, с 5,32-6,73 секунды Инерция 1 и Инерция 2 вращаются в фиксированном соотношении 2:1, из-за Simple Gear.
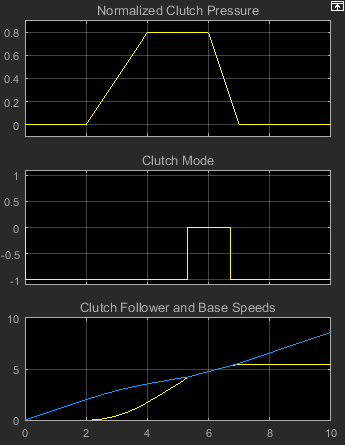
Сигнал режима сцепления указывает относительное движение двух соединенных валов. От 0 до 5,32 секунды два вала перемещаются относительно друг друга. Ведомый (ведомый) вал медленнее базового (ведущего) вала, поэтому сигнал режима равен -1. Как только два вала блокируются, их относительная скорость равна 0, и сигнал режима переключается на 0. Через 6,73 секунды они разблокируются, и ведущий (базовый) вал начинает ускоряться быстрее, чем ведомый (ведомый) вал. Сигнал режима переключается обратно в -1.
