В этом примере показано, как моделировать привод двойного действия с помощью Simscape™ Multibody™ и Simscape. Simscape Multibody моделирует механическую систему цилиндра, а Simscape - гидравлическую систему. Для соединения двух систем можно использовать блок Translational Multibody Interface.
На схемах показан цилиндр в трёх конфигурациях: наполовину убранный, полностью убранный и полностью выдвинутый.
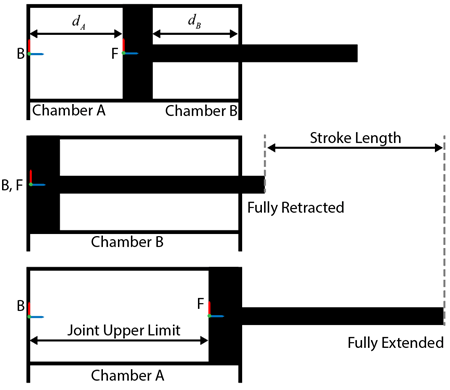
В Simscape Multibody можно моделировать механическую часть системы. Например, для моделирования цилиндра и поршня можно использовать блоки «Тело вращения» (Simscape Multibody) и «Тело цилиндрической формы» (Simscape Multibody). Для обеспечения поступательной степени свободы поршня используйте блок «Призматическое соединение» (Simscape Multibody). Чтобы легко рассчитать длины камер А и В, можно прикрепить базовую раму (В) и ведомую раму (F) соединения к центрам левой внутренней поверхности камеры А и левой поверхности поршня соответственно. Убедитесь, что оси Z B и F шпангоутов выровнены и обе направлены в сторону камеры B.
Используя это правило, длина камеры A, , является выводом положения соединительного блока, и длина камеры B, , равна разности длины хода и . Для предотвращения перемещения поршня за пределы цилиндра можно задать верхний и нижний пределы положения блока призматического соединения.
Примечание
Необходимо создать пользовательские рамки перед присоединением рамок соединения в нужных местах. Дополнительные сведения см. в разделе Пользовательские твердотельные кадры (Simscape Multibody).
На этом рисунке показана блок-схема описанной выше модели цилиндра двойного действия. В примере используются два блока поступательного механического преобразователя (IL) для моделирования камер A и B цилиндра. Блок Translational Multibody Interface соединяет блоки Translational Mechanical Converter (IL) с блоком Prismatic Joint. См. раздел Подключение сетей Simscape к соединениям Simscape Multibody для получения подробной информации об использовании блока Translational Multibody Interface.
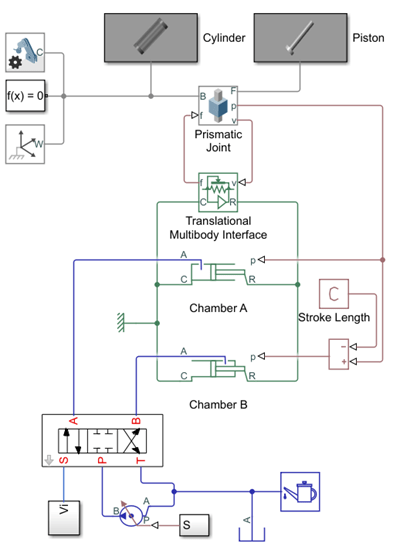
В камере А давление в отверстии А перемещает поршень от 0 до длины хода. Смещение поршня равно выходу положения блока призматического соединения. Для моделирования камеры A:
Подключите порты C и R блока Translational Multibody Interface к портам C и R верхнего блока Translational Mechanical Converter (IL) соответственно.
В блоке Translational Mechanical Converter (IL) установите для параметра Interface displacement значение Provide input signal from Multibody joint для включения порта p.
Соедините порты p блока призматического соединения и блока поступательного механического преобразователя (IL).
В камере В давление в отверстии А перемещает поршень от 0 до отрицательной длины хода. Поэтому необходимо изменить ориентацию по умолчанию и добавить смещение к входному сигналу положения нижнего блока поступательного механического преобразователя (IL). Смещение равно -.
В нижнем блоке поступательного механического преобразователя (IL) задайте для параметра «Механическая ориентация» значение Pressure at A causes negative displacement of R relative to C.
Установить смещение интерфейса в Provide input signal from Multibody joint для активизации порта p.
Добавьте блок PS Constant и укажите константу в качестве длины хода цилиндра.
Добавьте блок вычитания PS, а затем подключите его к блокам постоянного и призматического соединения PS, как показано на диаграмме. Обратите внимание, что выходной сигнал блока вычитания PS равен -.
Для ограничения хода поршня:
В блоке «Призматическое соединение» в разделе «Пределы» выберите параметры «Задать нижний предел» и «Указать верхний предел».
В разделе «Задать нижний предел» параметр «Граница» указывает минимальное расстояние между рамами B и F блока соединения. В этом примере задайте параметр Bound равным 0 м.
В разделе «Указать верхний предел» параметр «Граница» указывает максимальное расстояние между кадрами B и F блока «Призматическое соединение». В этом примере в качестве длины хода цилиндра укажите параметр «Граница».
Цилиндровые системы двойного действия могут использоваться во многих применениях. Например, разгрузочный прицеп может использовать цилиндр двойного действия для приведения в действие механизма ножничного подъемника, который поднимает и опускает разгрузочное основание. Дополнительные сведения см. в разделе Гидравлический интерфейс - Разгрузочный прицеп с гидравлическим цилиндром (Simscape Multibody). Под маской блока гидроцилиндров двойного действия в ножничном подъемнике находятся механическая и гидравлическая подсистемы, которые соединены блоком трансляционного мультибортного интерфейса. Блок призматического соединения в механической подсистеме предоставляет информацию о положении двум приводам в гидравлической подсистеме, головной камере и нижней камере, которые имеют противоположные настройки параметра ориентации Mechanical. Блок С константы обеспечивает смещение сигнала положения для исполнительного механизма камеры головки, поскольку, когда нижняя камера находится в мертвом объеме (где положение p = 0), камера головки имеет максимальный ход.
Вращательный многоборцевый интерфейс | Трансляционный мультибиблиотечный интерфейс
