В этом примере вы собираетесь смоделировать простую механическую систему и наблюдать за ее поведением в различных условиях. В этом учебном пособии показаны основные шаги по построению физической модели и приведены сведения об использовании основных блоков Simscape™.
Примечание
Методы экономии времени и расширенные способы анализа данных моделирования см. в учебном пособии «Основные шаги по построению физической модели».
Следующая схема представляет простую модель подвески автомобиля. Он состоит из пружины и демпфера, соединенных с корпусом (представленным как масса), который перемешивается силой. Можно изменять параметры модели, такие как жесткость пружины, масса тела или профиль силы, и просматривать результирующие изменения скорости и положения тела.
Чтобы создать эквивалентную схему Simscape, выполните следующие действия.
Откройте обозреватель библиотек Simulink ®, как описано в разделе Библиотеки блоков Simscape.
Создайте новую модель Simulink с помощью шаблона «Пустая модель». Программа создает пустую модель в памяти и отображает ее в новом окне редактора модели.
Примечание
Кроме того, можно ввести ssc_new в командной строке MATLAB ® для создания новой модели, предварительно заполненной определенными необходимыми и часто используемыми блоками. Дополнительные сведения см. в разделе Создание новой модели Simscape.
По умолчанию Simulink Editor скрывает имена автоматических блоков в схемах модели. Для отображения имен скрытых блоков в учебных целях снимите флажок «Скрыть имена автоматических блоков». Дополнительные сведения см. в разделе Управление именами блоков и портами.
Откройте библиотеку Simscape > Foundation Library > Mechanical > Translational Elements.
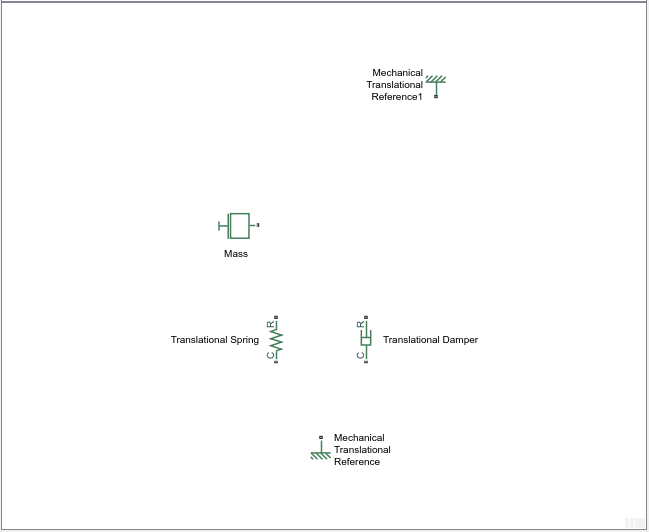
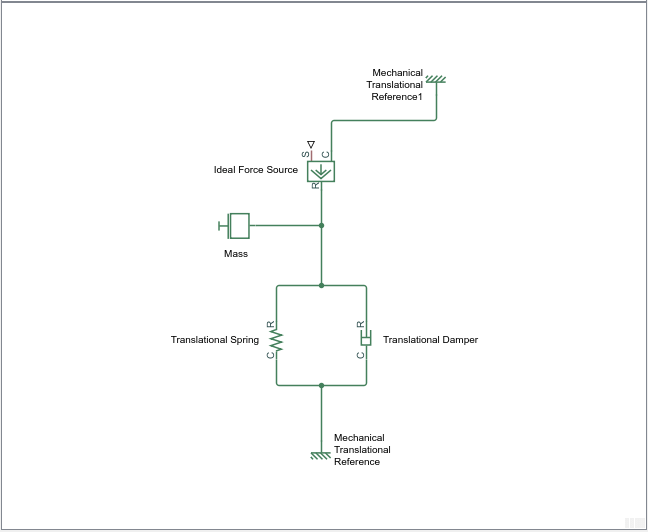
Перетащите в окно модели блоки «Масса», «Поступательная пружина», «Поступательный демпфер» и «Механическая поступательная привязка».
Сориентируйте блоки, как показано на следующей иллюстрации. Чтобы повернуть блок, выделите его и нажмите клавиши Ctrl + R.
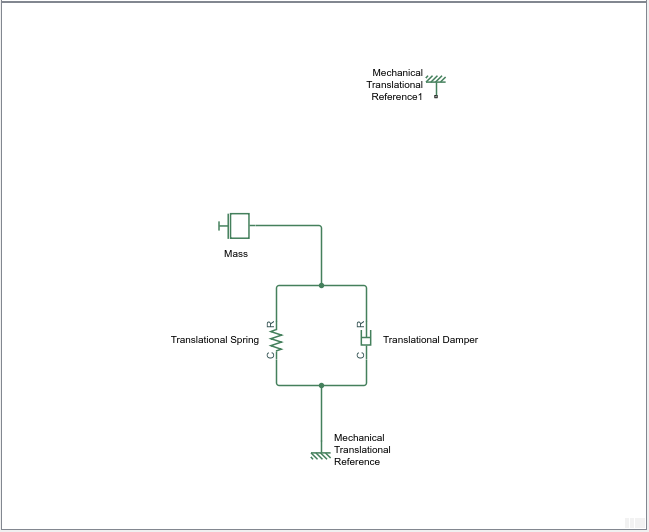
Соедините блоки поступательной пружины, поступательного демпфера и массы с одним из блоков механической поступательной привязки, как показано на следующей иллюстрации.
Чтобы добавить представление силы, действующей на массу, откройте библиотеку Simscape > Foundation Library > Mechanical > Mechanical Sources и добавьте в схему блок Ideal Force Source.
Чтобы отразить правильное направление силы, показанное на исходной схеме, переверните ориентацию блока. Если выбран блок Источник идеальной силы (Ideal Force Source), на вкладке Формат (Format) в верхней части окна модели в разделе Упорядочить (Arrange) щелкните Развернуть вверх-вниз (Flip up-down). Подключите порт C блока (для «случая») ко второму блоку механической поступательной ссылки, а его порт R (для «стержня») - к блоку массы, как показано ниже.
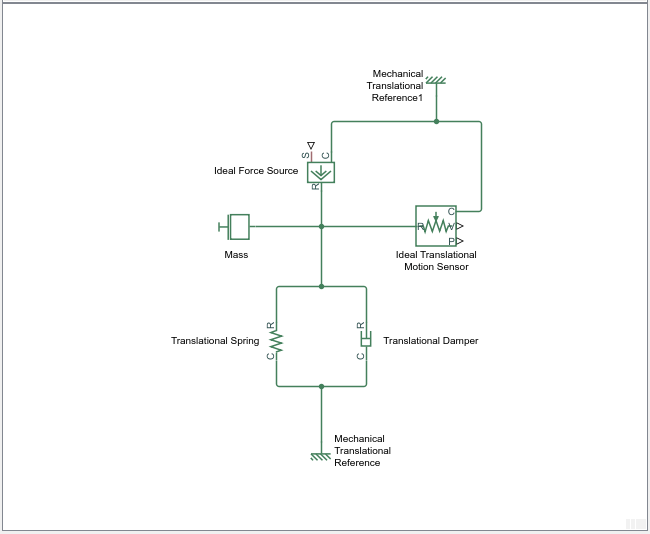
Добавьте датчик для измерения скорости и положения массы. Поместите блок датчика идеального поступательного движения из библиотеки механических датчиков в схему и подключите его, как показано ниже.
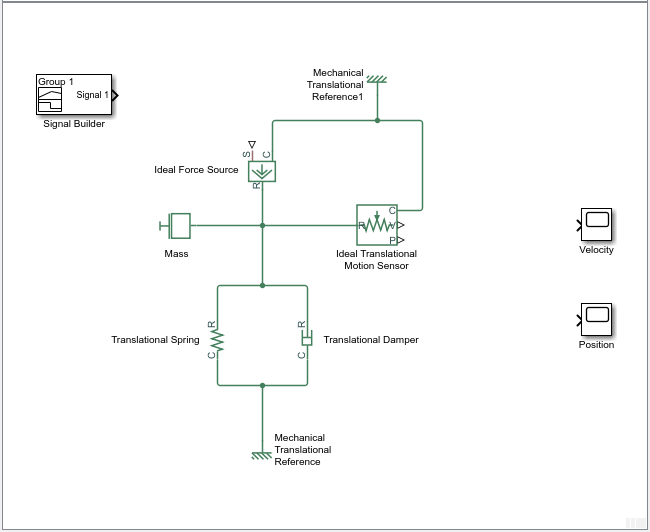
Теперь необходимо добавить источники и области. Они находятся в библиотеках Simulink. Откройте библиотеку Simulink > Sources и скопируйте блок Signal Builder в модель. Затем откройте библиотеку Simulink > Sinks и скопируйте два блока Scope. Переименование одного из блоков области в Velocity а другой - Position.
Каждый раз, когда вы подключаете источник или область Simulink к диаграмме Simscape, вы должны использовать соответствующий блок преобразователя, чтобы преобразовать сигналы Simulink в физические сигналы и наоборот. Откройте библиотеку Simscape > Utilities и скопируйте в модель блок конвертера Simulink-PS и два блока конвертера PS-Simulink. Подключите блоки, как показано ниже.
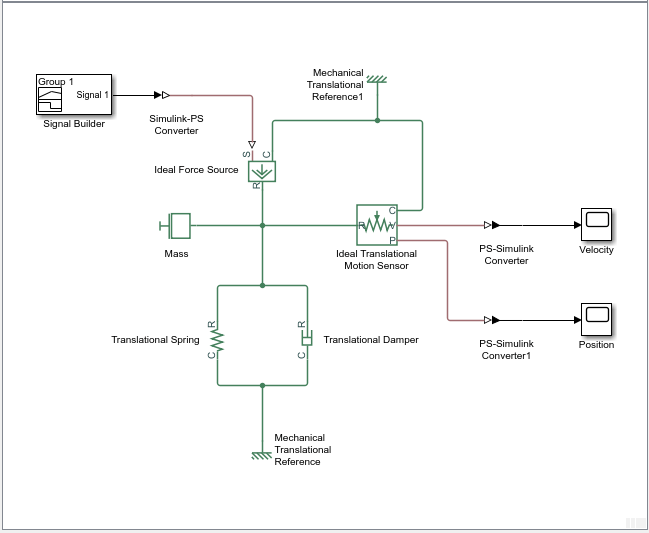
Для каждой топологически отдельной физической сети на диаграмме требуется ровно один блок конфигурации решателя, который находится в библиотеке Simscape > Utilities. Скопируйте этот блок в модель и подключите его к цепи, создав точку ветвления и подключив его к единственному порту блока конфигурации решателя. Ваша схема теперь должна выглядеть так.
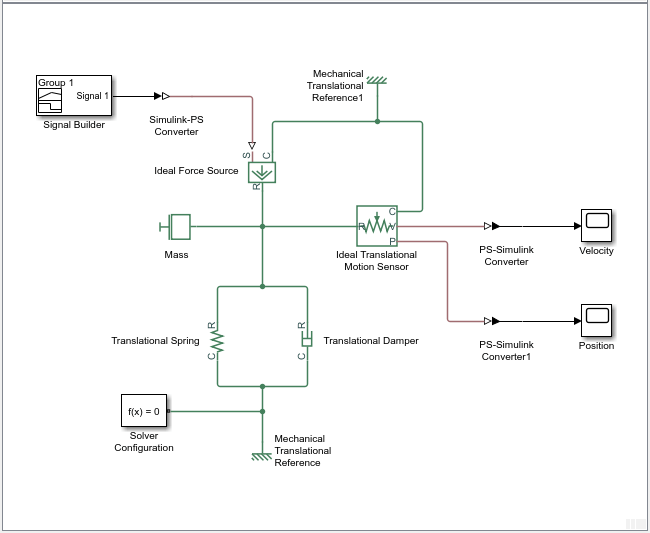
Блок-схема завершена. Сохранить как mech_simple.
После составления блок-схемы модели, как описано в предыдущем разделе, необходимо выбрать решатель и указать правильные значения параметров конфигурации.
Чтобы подготовиться к моделированию модели, выполните следующие действия.
Выберите решатель Simulink. В окне модели откройте вкладку Моделирование (Modeling) и щелкните Настройки модели (Model Settings). Откроется диалоговое окно Параметры конфигурации (Configuration Parameters) с панелью Решатель (Solver).
В разделе Выбор решателя (Solver selection) задайте для параметра Решатель (Solver) значение ode23t (mod.stiff/Trapezoidal).
Разверните узел Сведения о решателе и задайте для параметра Максимальный размер шага значение 0.2.
Также следует отметить, что время моделирования должно быть от 0 до 10 секунд. При необходимости этот параметр можно изменить позже.
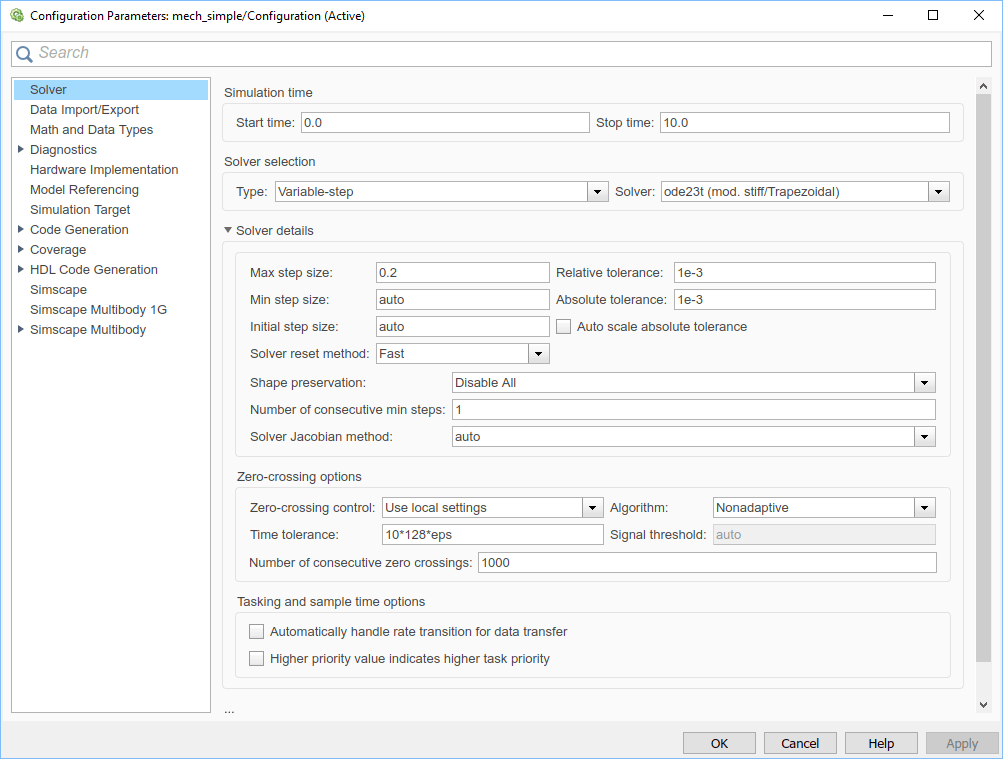
Нажмите кнопку ОК, чтобы закрыть диалоговое окно Параметры конфигурации (Configuration Parameters).
Сохраните модель.
После создания блок-схемы и задания начальных настроек модели можно запустить моделирование.
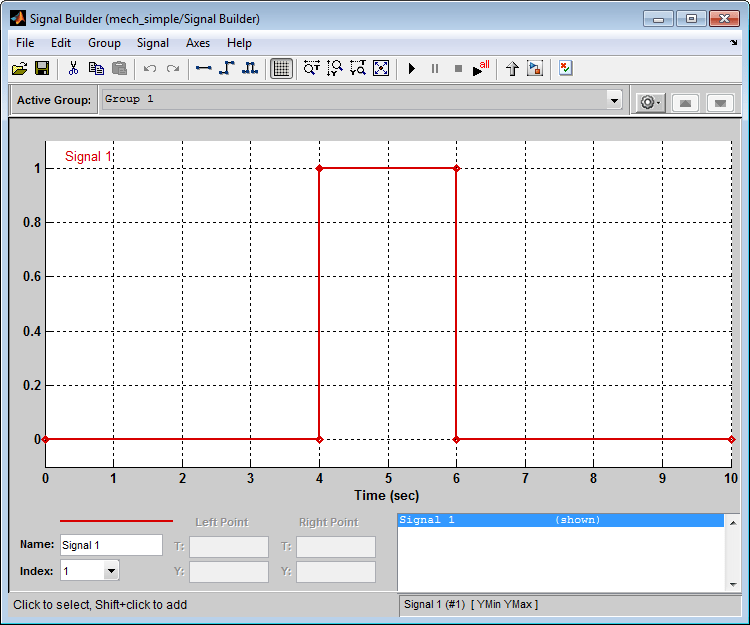
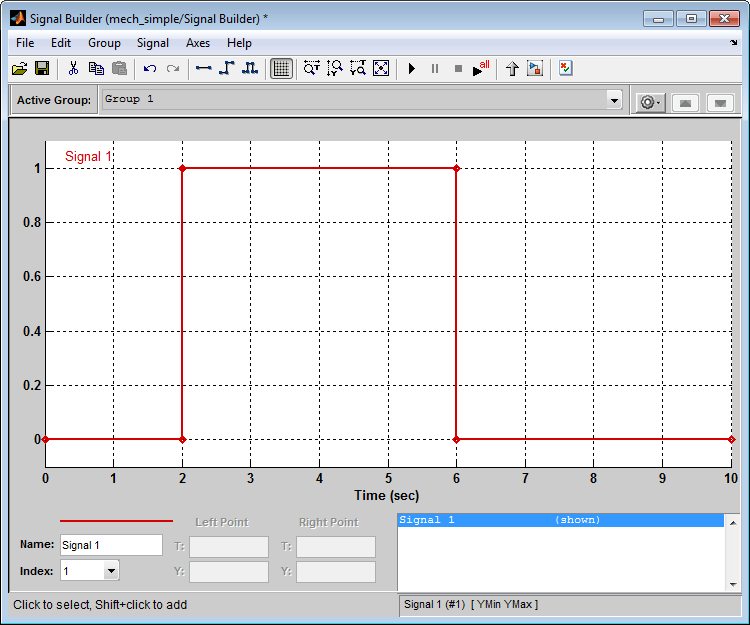
Входной сигнал для силы подается блоком Signal Builder. Профиль сигнала показан на иллюстрации ниже. Он начинается со значения 0, затем через 4 секунды шаг изменяется на 1, а затем возвращается на 0 через 6 секунд. Это профиль по умолчанию.
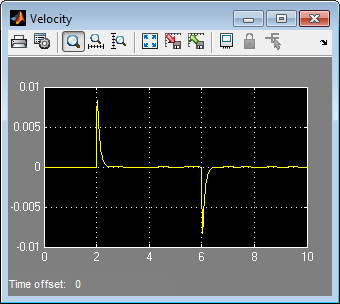
В области «Скорость» отображается массовая скорость, а в области «Положение» - смещение массы в зависимости от времени. Дважды щелкните обе области, чтобы открыть их.
Щелкните. ![]() Решатель Simscape оценивает модель, вычисляет начальные условия и выполняет моделирование. Подробное описание этого процесса см. в разделе Как работает Simscape Simulation. Выполнение этого шага может занять несколько секунд. Сообщение в левом нижнем углу окна модели предоставляет обновление статуса.
Решатель Simscape оценивает модель, вычисляет начальные условия и выполняет моделирование. Подробное описание этого процесса см. в разделе Как работает Simscape Simulation. Выполнение этого шага может занять несколько секунд. Сообщение в левом нижнем углу окна модели предоставляет обновление статуса.
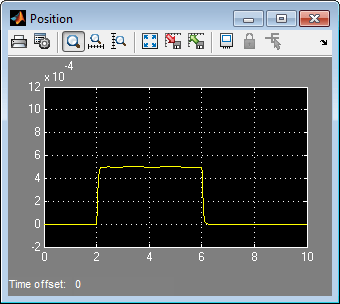
После запуска моделирования в окнах «Скорость» и «Положение» отображаются результаты моделирования, как показано на следующей иллюстрации.
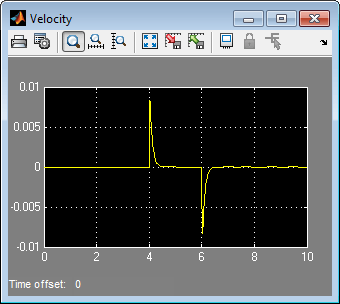
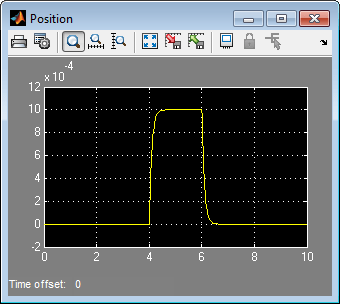
В начале масса находится в состоянии покоя. Затем через 4 секунды, когда входной сигнал резко изменяется, скорость массы увеличивается в положительном направлении и постепенно возвращается к нулю. Положение массы в то же время изменяется более постепенно из-за инерции и демпфирования и остается на новом значении до тех пор, пока на него действует сила. Через 6 секунд, когда входной сигнал изменяется обратно на ноль, скорость получает зеркальный всплеск, и масса постепенно возвращается в исходное положение.
Теперь можно настроить различные входные данные и параметры блоков и увидеть их влияние на массовую скорость и смещение.
После выполнения начального моделирования можно поэкспериментировать с регулировкой различных входных данных и параметров блока.
Попробуйте выполнить следующие корректировки:
В этом примере показано, как изменение входного сигнала влияет на профиль силы и, следовательно, на смещение массы.
Дважды щелкните блок Signal Builder, чтобы открыть его.
Щелкните первый вертикальный сегмент профиля сигнала и перетащите его от 4 до 2 секунд, как показано ниже. Закройте диалоговое окно блока.
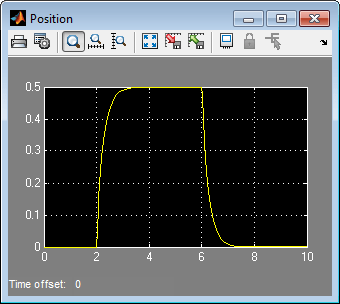
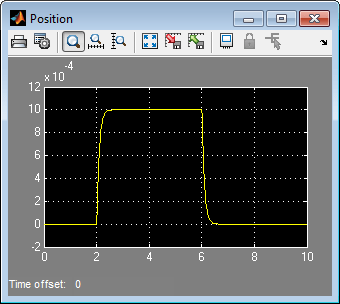
Запустите моделирование. Результаты моделирования показаны на следующей иллюстрации.
В нашей модели сила действует на массу против поступательной пружины и демпфера, соединенных параллельно. В этом примере показано, как изменения жесткости пружины и вязкости демпфера влияют на перемещение массы.
Дважды щелкните на блоке «Поступательная пружина». Установите для параметра «Скорость пружины» значение 2000 N/m.
Запустите моделирование. Увеличение жесткости пружины приводит к уменьшению амплитуды смещения массы, как показано на следующей иллюстрации.
Затем дважды щелкните блок «Поступательный демпфер». Установить его коэффициент демпфирования равным 500 N/(m/s).
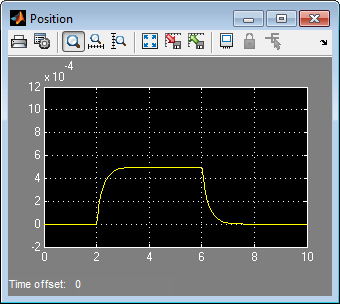
Запустите моделирование. Из-за увеличения вязкости масса медленнее как при достижении максимального смещения, так и при возвращении в исходное положение, как показано на следующей иллюстрации.
В нашей модели мы использовали блок PS-Simulink Converter в конфигурации параметров по умолчанию. Следовательно, Position область действия выводит смещение массы в единицах длины по умолчанию, то есть в метрах. В этом примере показано, как изменить выходные единицы для массового смещения на миллиметры.
Дважды щелкните блок Converter1 PS-Simulink. Напечатать mm в поле со списком Output signal unit и нажмите OK.
Запустите моделирование. В Position щелкните,![]() чтобы автоматически масштабировать оси области. Теперь смещение массы выводится в миллиметрах, как показано на следующей иллюстрации.
чтобы автоматически масштабировать оси области. Теперь смещение массы выводится в миллиметрах, как показано на следующей иллюстрации.